今天分享的是机器人系列深度研究报告:《机器人报告:准直驱执行器深度:人形机器人执行器技术的前沿》。
(报告出品方:招商证券)
报告共计:34页
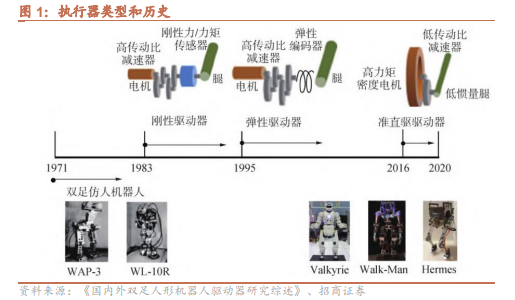
人形机器人执行器研究经历了刚性、弹性和准直驱三个阶段
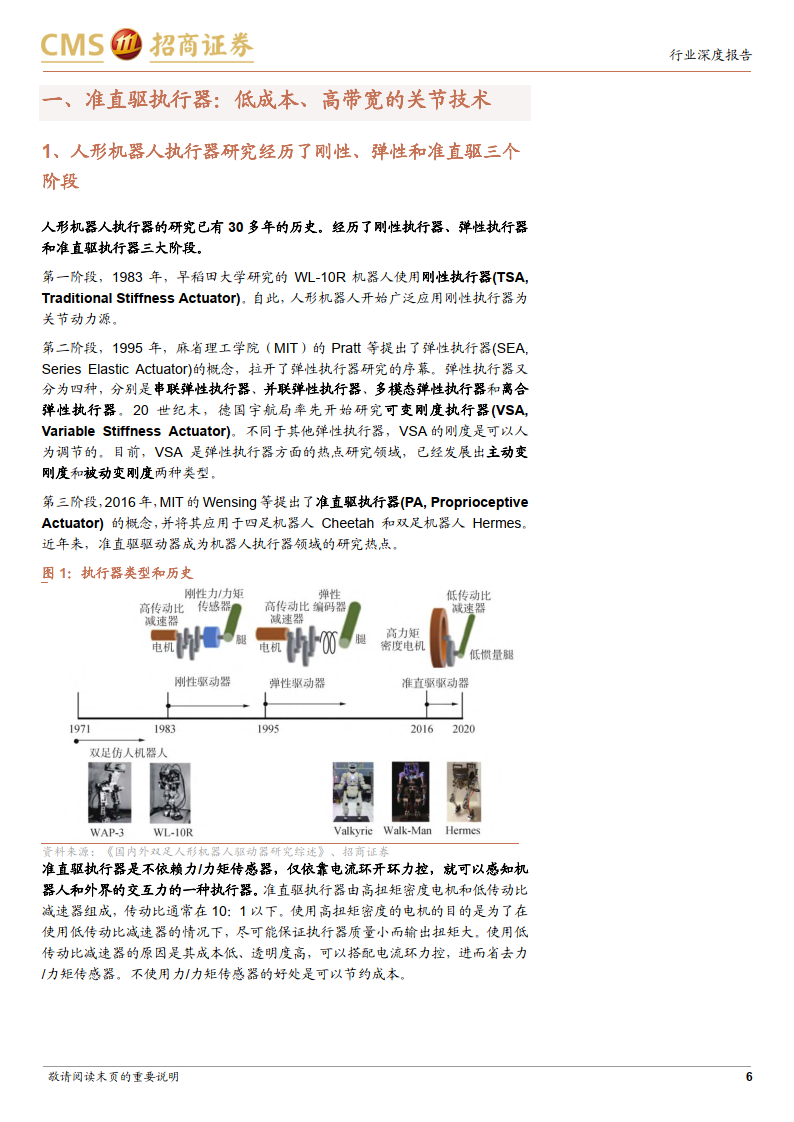
人形机器人执行器的研究已有 30多年的历史。经历了刚性执行器、弹性执行器和准直驱执行器三大阶段。
第一阶段,1983 年,早稻田大学研究的 WL-10R 机器人使用刚性执行器(TSATraditional Stiffness Actuator)。自此,人形机器人开始广泛应用刚性执行器为关节动力源。
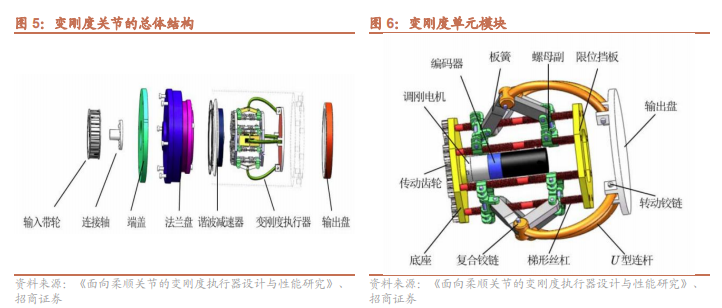
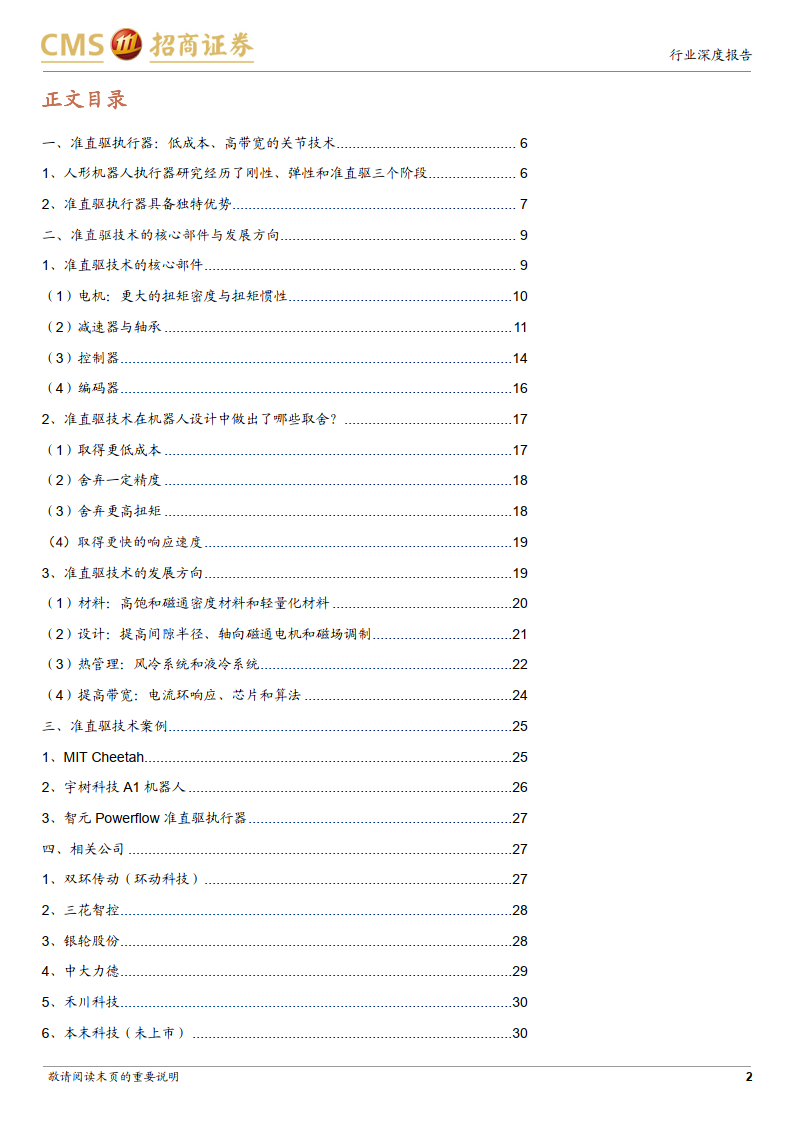
第二阶段,1995 年,麻省理工学院(MIT)的Pratt 等提出了弹性执行器(SEA.Series Elastic Actuator)的概念,拉开了弹性执行器研究的序幕。弹性执行器又分为四种,分别是串联弹性执行器、并联弹性执行器、多模态弹性执行器和离合弹性执行器。20世纪末,德国宇航局率先开始研究可变刚度执行器(VSAVariable Stiffness Actuator)。不同于其他弹性执行器,VSA 的刚度是可以人为调节的,目前,VSA 是弹性执行器方面的热点研究领域,已经发展出主动变刚度和被动变刚度两种类型。
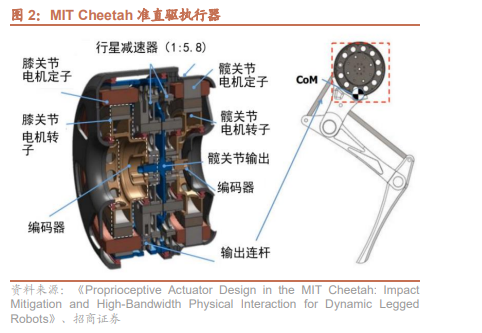
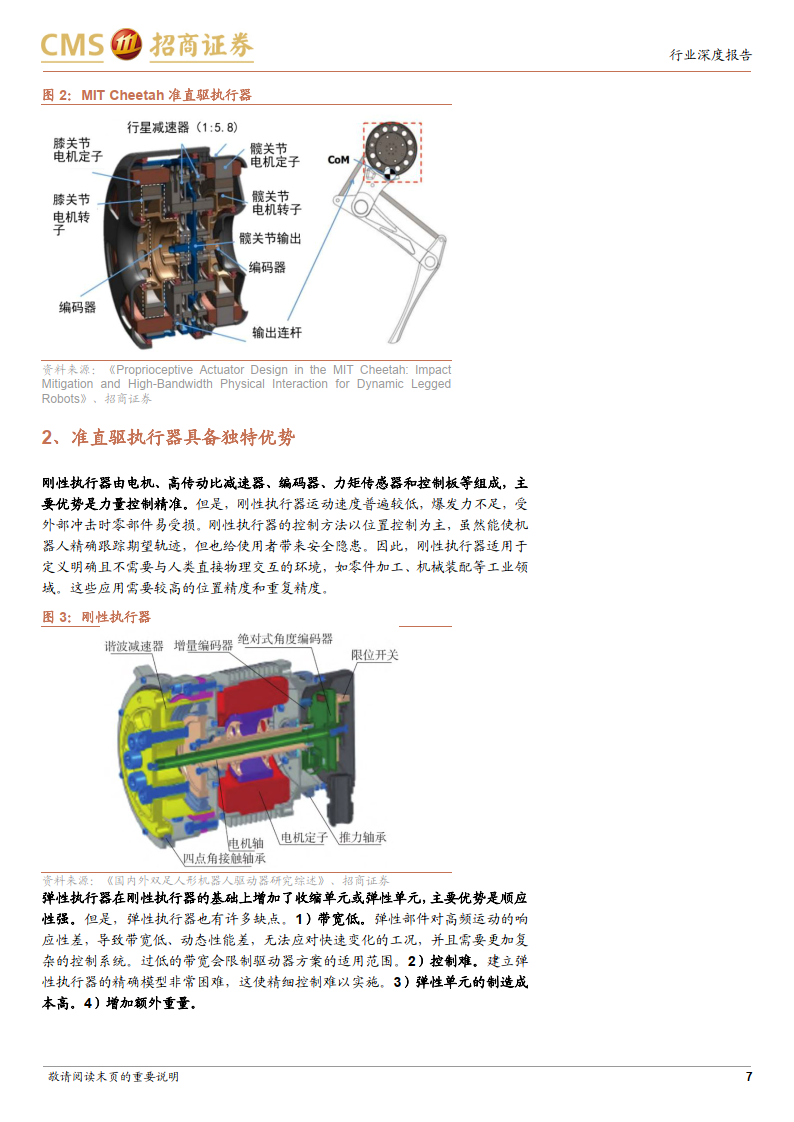
第三阶段,2016年,MIT的Wensing等提出了准直驱执行器(PA,ProprioceptiveActuator)的概念,并将其应用于四足机器人 Cheetah 和双足机器人 Hermes.近年来,准直驱驱动器成为机器人执行器领域的研究热点。
准直驱执行器是不依赖力/力矩传感器,仅依靠电流环开环力控,就可以感知机 器人和外界的交互力的一种执行器。准直驱执行器由高扭矩密度电机和低传动比 减速器组成,传动比通常在 10:1 以下。使用高扭矩密度的电机的目的是为了在使用低传动比减速器的情况下,尽可能保证执行器质量小而输出扭矩大。使用低 传动比减速器的原因是其成本低、透明度高,可以搭配电流环力控,进而省去力 /力矩传感器。不使用力/力矩传感器的好处是可以节约成本。
准直驱执行器具备独特优势
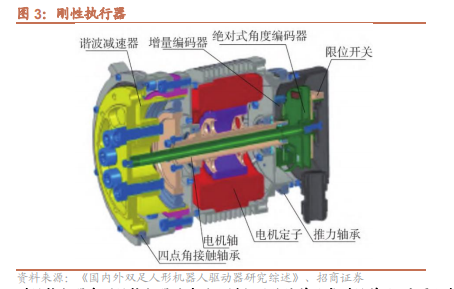
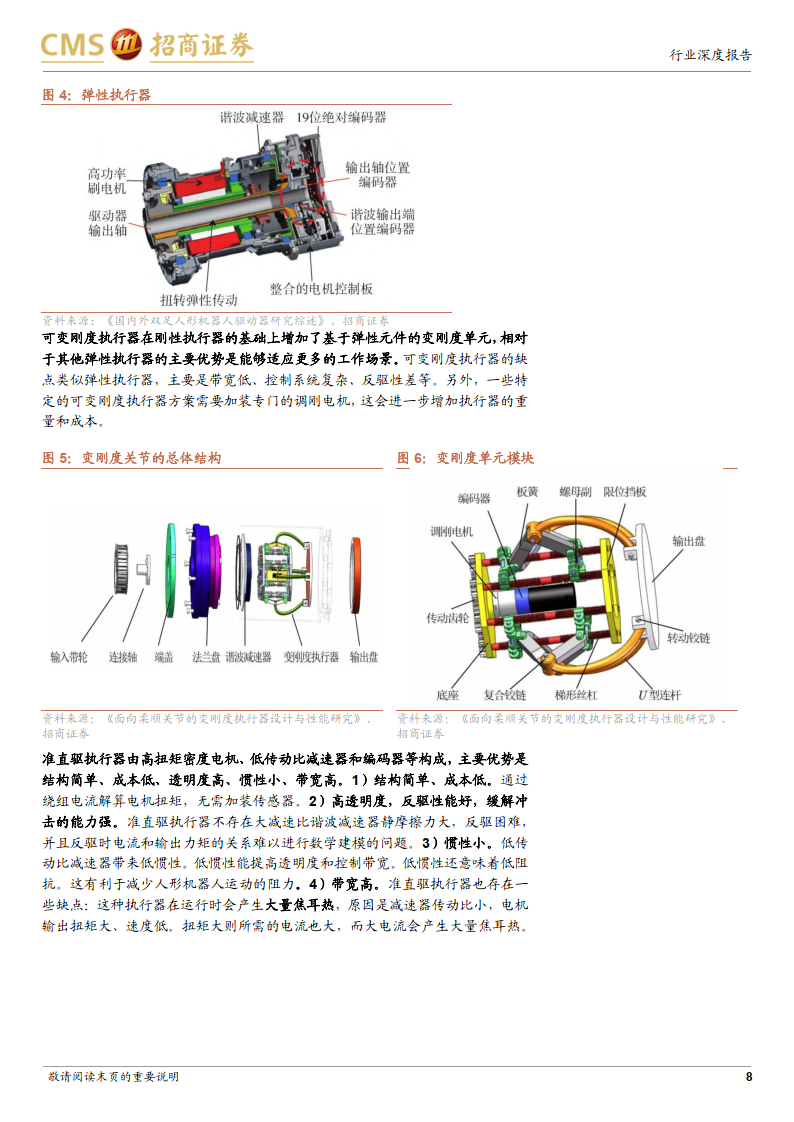
刚性执行器由电机、高传动比减速器、编码器、力矩传感器和控制板等组成,主 要优势是力量控制精准。但是,刚性执行器运动速度普遍较低,爆发力不足,受 外部冲击时零部件易受损。刚性执行器的控制方法以位置控制为主,虽然能使机 器人精确跟踪期望轨迹,但也给使用者带来安全隐患。因此,刚性执行器适用于定义明确且不需要与人类直接物理交互的环境,如零件加工、机械装配等工业领域。这些应用需要较高的位置精度和重复精度。
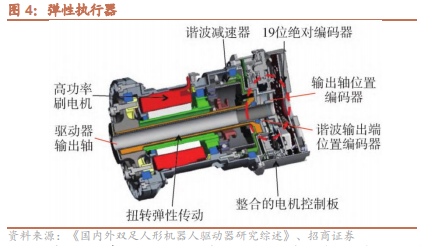
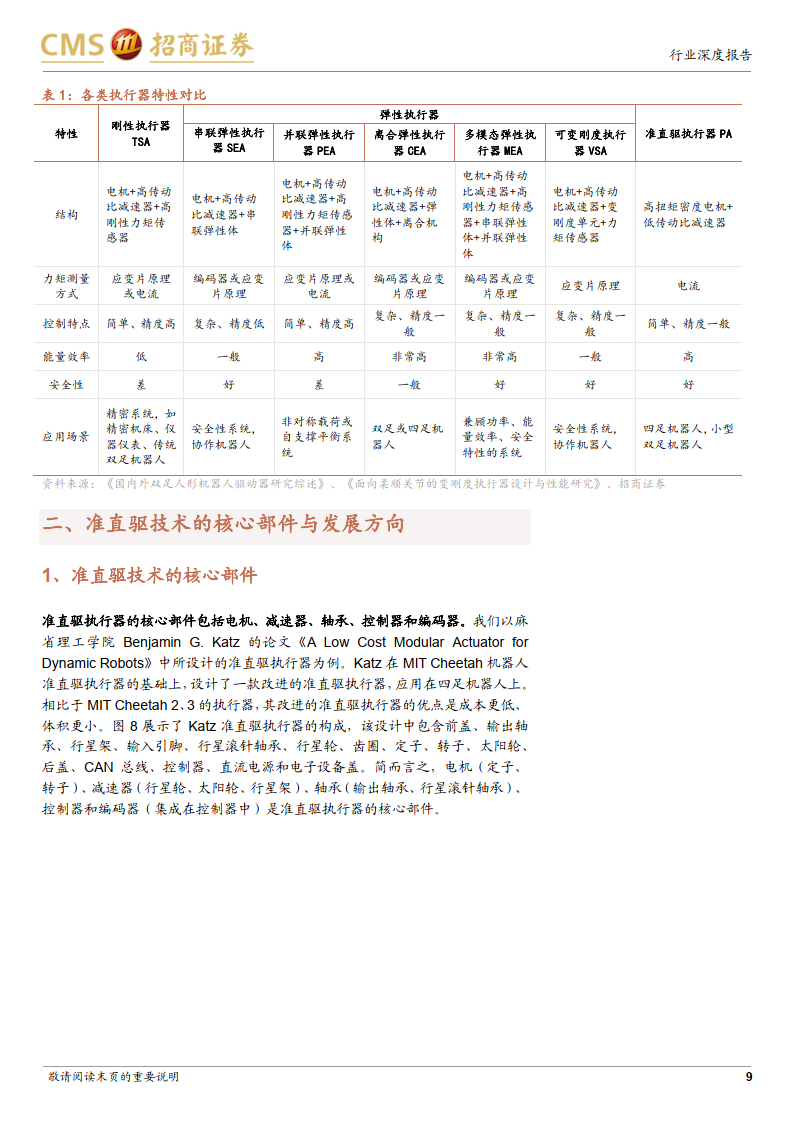
弹性执行器在刚性执行器的基础上增加了收缩单元或弹性单元,主要优势是顺应 性强。但是,弹性执行器也有许多缺点。1)带宽低。弹性部件对高频运动的响 应性差,导致带宽低、动态性能差,无法应对快速变化的工况,并且需要更加复杂的控制系统。过低的带宽会限制驱动器方案的适用范围。2)控制难。建立弹性执行器的精确模型非常困难,这使精细控制难以实施。3)弹性单元的制造成本高。4)增加额外重量。
可变刚度执行器在刚性执行器的基础上增加了基于弹性元件的变刚度单元,相对 于其他弹性执行器的主要优势是能够适应更多的工作场景。可变刚度执行器的缺 点类似弹性执行器,主要是带宽低、控制系统复杂、反驱性差等。另外,一些特定的可变刚度执行器方案需要加装专门的调刚电机,这会进一步增加执行器的重 量和成本。
准直驱执行器由高扭矩密度电机、低传动比减速器和编码器等构成,主要优势是 结构简单、成本低、透明度高、惯性小、带宽高。1)结构简单、成本低。通过 绕组电流解算电机扭矩,无需加装传感器。2)高透明度,反驱性能好,缓解冲 击的能力强。准直驱执行器不存在大减速比谐波减速器静摩擦力大,反驱困难, 并且反驱时电流和输出力矩的关系难以进行数学建模的问题。3)惯性小。低传 动比减速器带来低惯性。低惯性能提高透明度和控制带宽。低惯性还意味着低阻抗。这有利于减少人形机器人运动的阻力。4)带宽高。准直驱执行器也存在一 些缺点:这种执行器在运行时会产生大量焦耳热,原因是减速器传动比小,电机 输出扭矩大、速度低。扭矩大则所需的电流也大,而大电流会产生大量焦耳热。
准直驱技术的核心部件
准直驱执行器的核心部件包括电机、减速器、轴承、控制器和编码器。我们以麻 省理工学院 Benjamin G. Katz 的论文《A Low Cost Modular Actuator for Dynamic Robots》中所设计的准直驱执行器为例。Katz 在 MIT Cheetah 机器人 准直驱执行器的基础上,设计了一款改进的准直驱执行器,应用在四足机器人上。 相比于 MIT Cheetah 2、3 的执行器,其改进的准直驱执行器的优点是成本更低、 体积更小。图 8 展示了 Katz 准直驱执行器的构成,该设计中包含前盖、输出轴 承、行星架、输入引脚、行星滚针轴承、行星轮、齿圈、定子、转子、太阳轮、 后盖、CAN 总线、控制器、直流电源和电子设备盖。简而言之,电机(定子、 转子)、减速器(行星轮、太阳轮、行星架)、轴承(输出轴承、行星滚针轴承)、 控制器和编码器(集成在控制器中)是准直驱执行器的核心部件。


报告共计:34页
本文作者可以追加内容哦 !

