盖世汽车讯 人们通过谷歌地图进行导航时,可能很快找到到达目的地的路线。但是,谷歌软件有时会表现出局限性,即使是地图上的微小错误,也可能将简单的旅程变成一场噩梦。据外媒报道,通用汽车公司(General Motors)认为,在越野过程中实现精准导航的唯一方法是使用无人机,并已为此申请了一项系统专利。该系统允许无人机停靠和脱离车辆,专门用于扫描前方道路。
(图片来源:USPTO)
通用汽车认为,飞行器有助于收集宝贵的信息,以帮助驾驶员在越野模式下导航。驾驶员启用AI Scout Drone模式后,在越野路线上行驶的车辆将部署无人机,开始扫描前方道路并寻找到达目的地的方法。然而,最重要的是它如何确定最佳路线。
通用汽车表示,无人机可以确定基本的越野路线条件,包括斜度、接近角和离去角、岩石和其他障碍物的大小、类型和难度级别,以及土壤条件(例如岩石、碎石、泥土和沙子是干的还是湿的)和可能的车辆路径。在越野冒险过程中,当更多的车辆试图通过崎岖地形时,这将特别有用。
当收集到这些数据后,无人机允许由人工智能驱动的系统生成一条或多条路线。这些信息被传输到车辆上,驾驶员可以在信息娱乐屏幕上显示的可用路线(使用颜色编码系统)中进行选择。绿色路线是推荐路线,而黄色和红色代表更困难的替代方案(基于前面提到的因素)。
这种路线规划引擎(routing engine)比谷歌地图更复杂,需要考虑从车辆中收集的额外信息,包括车辆大小,更重要的是,驾驶员通过复杂地形的技能。如果驾驶员以前很难通过类似的路线,无人机可以寻找更方便的替代方案,以供驾驶员使用,避免其陷入被困或更糟的风险。
最终,无人机将结合地形和车辆提供的数据,生成与每个驾驶员及其技能相匹配的路线。通用汽车表示,无人机和车辆之间的连接将作为客户端-服务器数据交换,它们可以继续相互提供信息,以生成更准确的路线。例如,汽车可以提供传感器的数据,包括电池电量。无人机将接收电池信息,并根据现有地形寻找路线,使车辆能够到达目的地。
简言之,无人机将尝试估计车辆在建议路线上行驶时将消耗多少功率,将其与现有续航里程进行比较,并最终确定该路线是否可以使用。在某些情况下,如果电池电量不允许车辆到达终点,它还可以寻找可用的充电站并将其添加到导航中。该系统的工作原理类似Android Automotive上的谷歌地图集成,导航应用会根据电池电量来提出路线建议并自动停车充电。
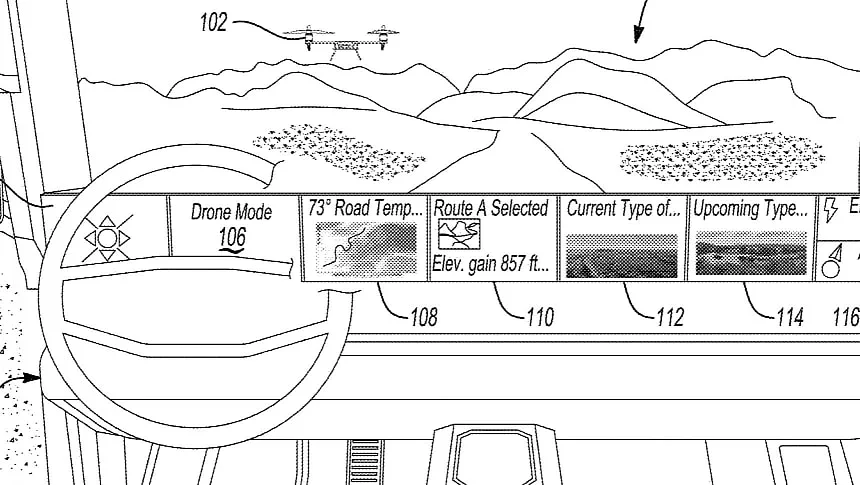
通用汽车还设想在部署无人机时采用自定义仪表板样式。仪表板上会显示一条信息,告知驾驶员他们正处于“无人机模式”,仪表板上的其他屏幕会显示道路温度、所选路线、海拔、当前和即将到来的地形类型、能源管理信息,以及是否有替代路线可用。驾驶员将始终完全控制路线系统。当无人机找到一条新路线并将其显示在仪表板上时,只有驾驶员或其他车辆乘员能启用它。
目前,通用汽车的想法仍处于专利申请阶段,因此无法确定该公司最终是否会将其投入量产。
本文作者可以追加内容哦 !

