近几年,得益于材料科学的进步,软机器人技术迭代速度加快。尤其是在需要高度灵活性和复杂环境适应性的应用场景中,软机器人已经开始进入早期落地探索阶段。在传统研究领域当中,跳跃运动在自然界中被众多生物所采用,比如蚱蜢通过后腿的强大肌肉实现惊人的跳跃高度和距离。但将这一能力转移到机器人技术上,尤其是使用软材料制作的机器人,一直是一个巨大的挑战。
近日,由Tang等研究人员开发的一种磁驱动超快双稳态软跳跃器(以下简称“双稳态软跳跃器”)为这一难题提供了创新性的解决方案。它可以通过磁场触发快速跳跃转换。该机器人由磁性面板和弹性体折痕制成,可以快速从金字塔顶部向上过渡到向下,推动机器人向上移动超过其高度的 100 倍。通过调整磁场的强度、持续时间和方向,机器人的运动可以从跳跃变为跳跃,并且可以控制其轨迹,使其能够穿越管道等狭窄空间。目前该研究成果已刊登在8月《Science Robotics》期刊上。
研究团队在光、热、电、磁四种方案上寻找最佳驱动源
从昆虫到鱼类,自然界中许多生物都利用跳跃作为移动、狩猎或逃避捕食者的手段。例如,蚱蜢能够通过其后腿实现超过其体长10倍的垂直跳跃和20倍的水平跳跃。这种高效的移动方式激发了科学家们对跳跃式机器人的研究兴趣,特别是在微型机器人领域。
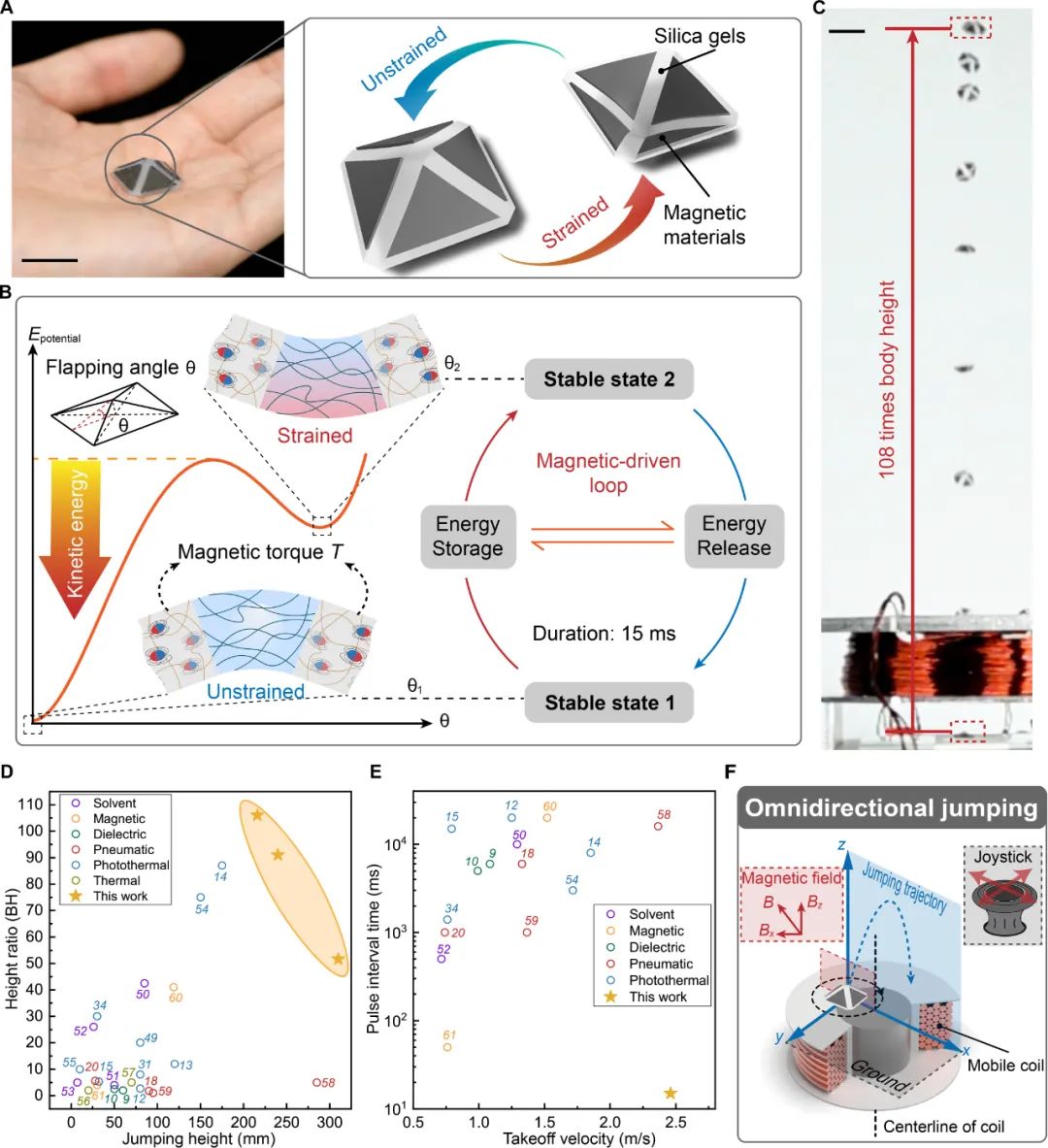
双稳态软跳跃器示意图
软机器人作为微机器人的一种表现形式,相较于刚性机器人具有更高的弹性变形能力、抗冲击性和耐用性。然而,软材料较低的模量和柔顺性使得实现高效跳跃成为一大难题。具体来看,跳跃运动要求高功率输出和快速响应时间,但在软材料当中则难以实现。如果基于软材料设计的软体机器人则大多不具备灵活性与跳跃能力。
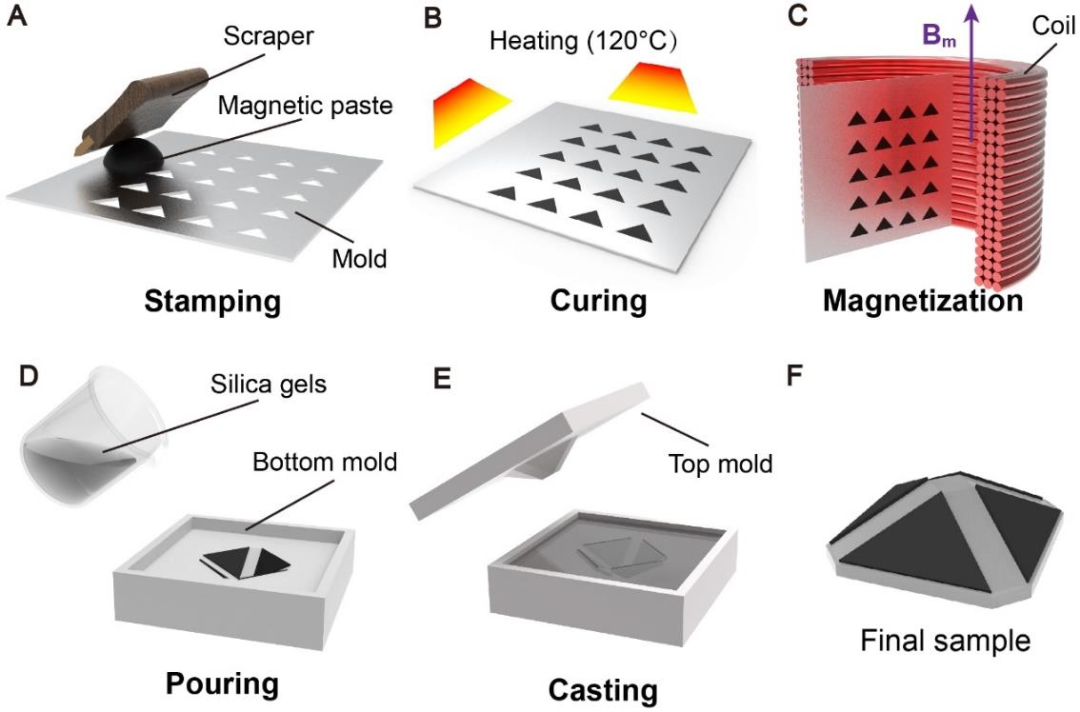
双稳态软跳线制造示意图
研究人员表示,现有的软体跳跃机器人大多依赖于各种刺激源,如光、热、电、磁等。然而,这些机器人在跳跃能力、响应速度和连续跳跃能力方面仍存在不足。例如,光驱动机器人虽然具备较高的响应速度,但光热效应的恢复时间较长。磁驱动机器人则因其磁性粒子的快速响应性而备受关注,但在实际应用中仍面临许多技术挑战。
金字塔形折叠结构 研究人员开发出双稳态软跳跃器
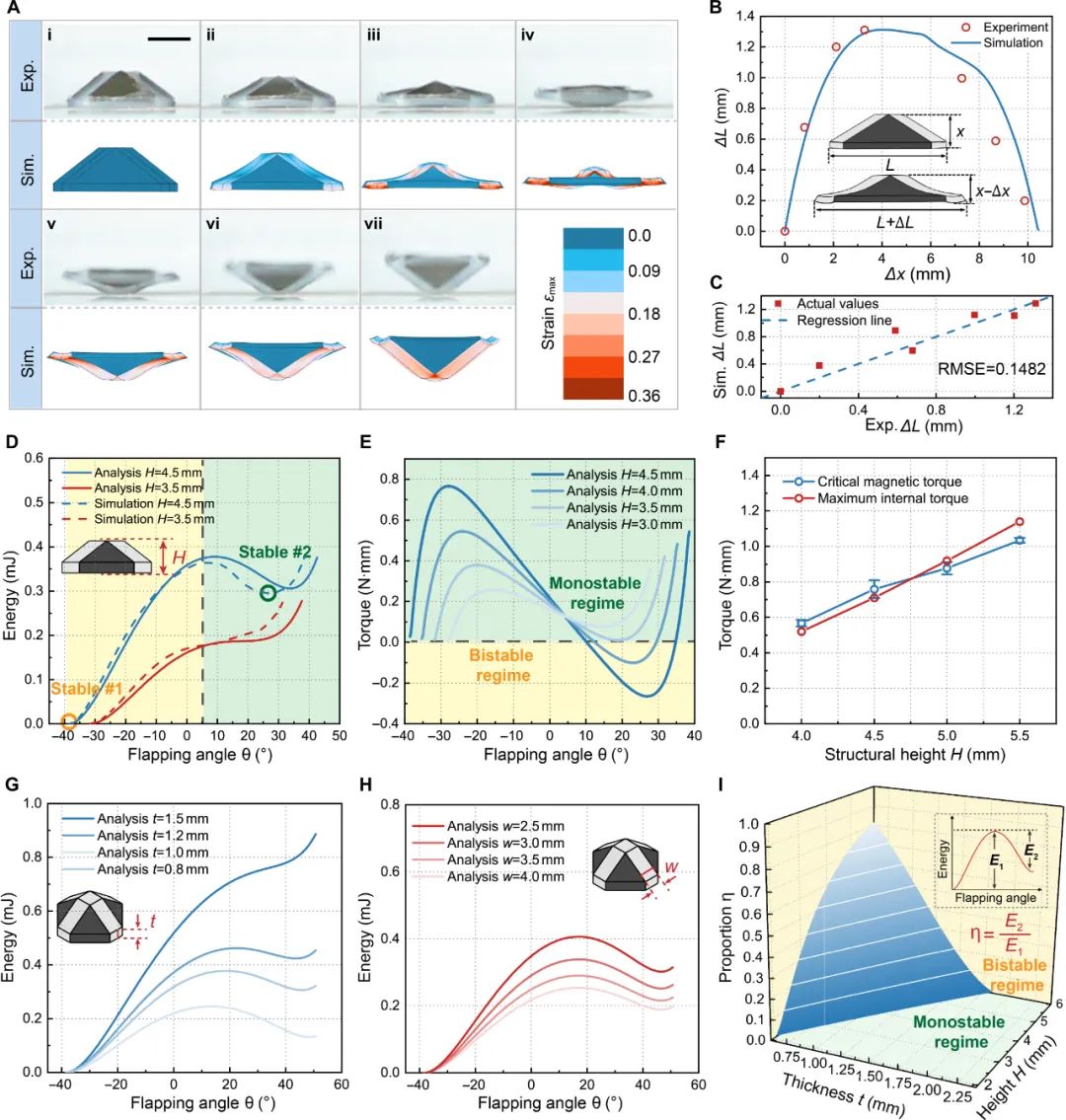
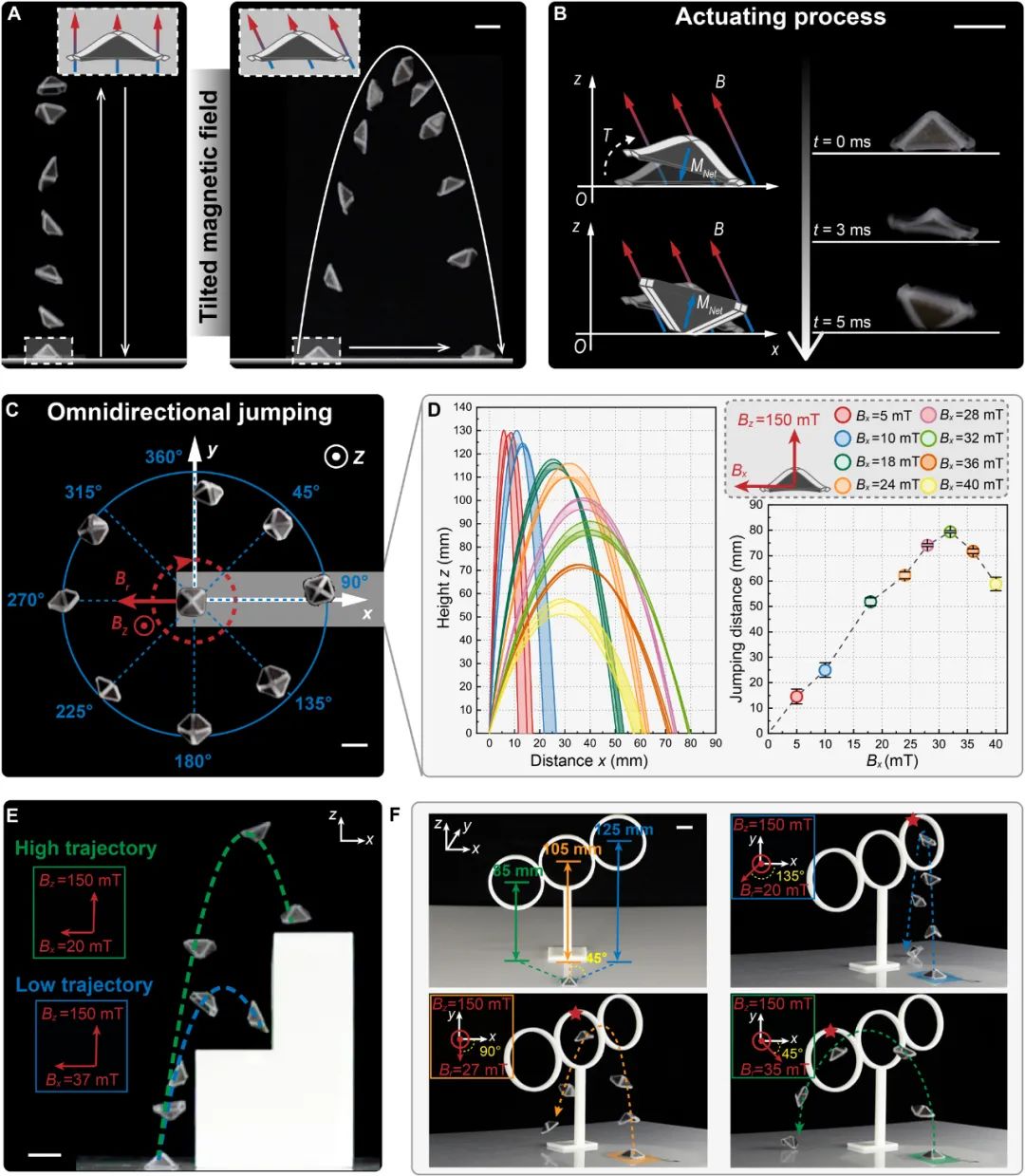
双稳态软跳跃器采用金字塔形折叠结构,由磁性面板和弹性体折痕组成。这种结构能够在两种稳定状态之间快速转换,利用突跳不稳定性实现能量的快速释放。具体来看,稳定态1对应结构的无应变配置,而稳定态2则对应结构稳定在内部势能能垒中的配置。当外部磁场触发时,结构由稳定态2迅速转变回稳定态1,释放储存的弹性势能,转化为跳跃的动能。
双稳态结构的机制
研究人员表示,磁驱动是实现双稳态转换的关键。磁性面板中的NdFeB铁磁颗粒在外部磁场的作用下迅速翻转,驱动整个结构的变形。磁驱动的优势在于其快速响应性和穿透性,能够在密闭环境中工作,无需直接接触。
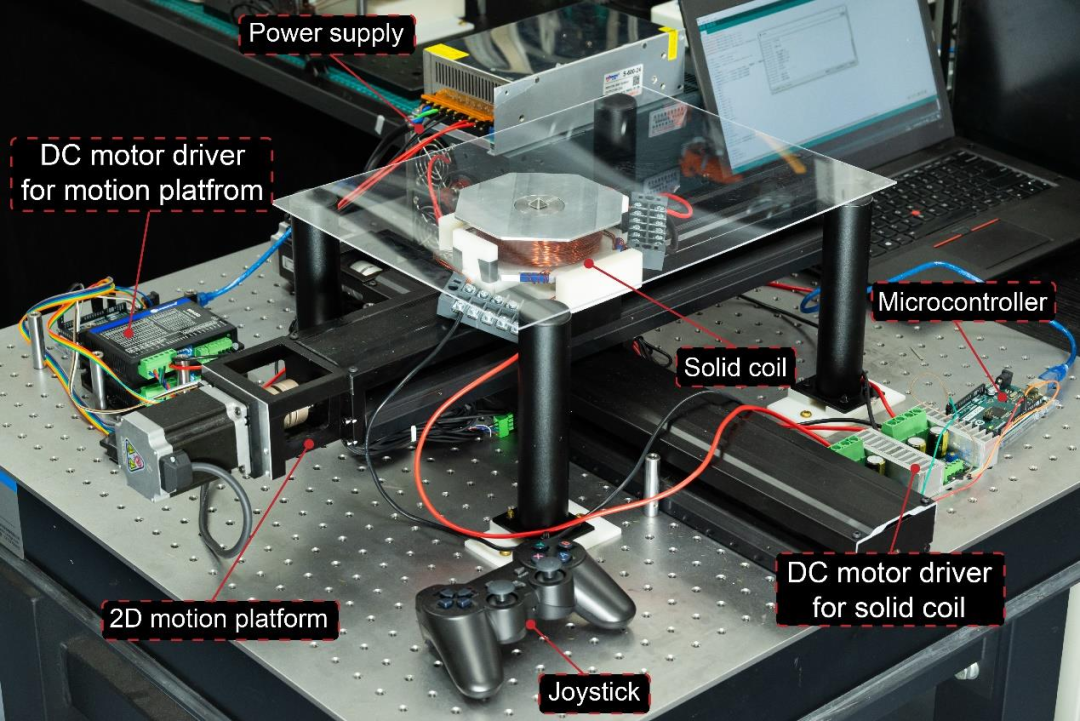
可移动磁场装置示意图
此外,通过调整磁场的强度、持续时间和方向,可以精确控制双稳态软跳跃器的运动轨迹和跳跃模式。
双稳态软跳跃器不仅具备跳跃能力,还能够实现多模态运动,包括井间跳跃模式和井内跳跃模式。通过调整磁场参数,能够在不同环境下选择最合适的运动模式。此外,双稳态软跳跃器还能够进行360全方位跳跃,并精确调整跳跃的高度和距离。
双稳态软跳跃器可实现 速度2米/秒 跳跃高度其身高100倍以上
为了验证双稳态软跳跃器的实际性能,研究人员对其进行了综合测试,测试结果表明。双稳态软跳跃器能够跳跃到其身高的100倍以上,起跳速度超过2米/秒,响应时间小于15毫秒。这些性能指标显著优于现有软体跳跃机器人,甚至可与自然界中的跳跃昆虫相媲美。

双稳态软跳跃器动态特性调查
研究人员表示,通过有限元分析和理论模型验证,双稳态结构在变形过程中能够储存大量弹性势能。当外部磁场触发时,这些势能迅速释放,转化为跳跃的动能。理论分析还表明,结构参数如折痕宽度和厚度对双稳态特性和能量释放效果有显著影响。
双稳态软跳跃器的定向跳跃
此外,通过倾斜磁场的作用,双稳态软跳跃器能够实现定向跳跃。实验证明,通过改变磁场方向,双稳态软跳跃器可以沿任意方向跳跃,并保持一致的跳跃距离和高度。此外,通过调整磁场参数,可以精确控制跳跃轨迹,使其适应不同应用场景的需求。
双稳态软跳跃器商用潜力大 具备量产基础
研究人员表示,双稳态软跳跃器拥有较大的市场潜力,尤其是在复杂环境中的应用。例如,在管道清洁任务中,双稳态软跳跃器能够穿越狭窄且多变的管道空间,通过跳跃和滚动等动作完成清洁工作。此外,在水下环境中,双稳态软跳跃器同样能够展示出色的机动性和响应速度。
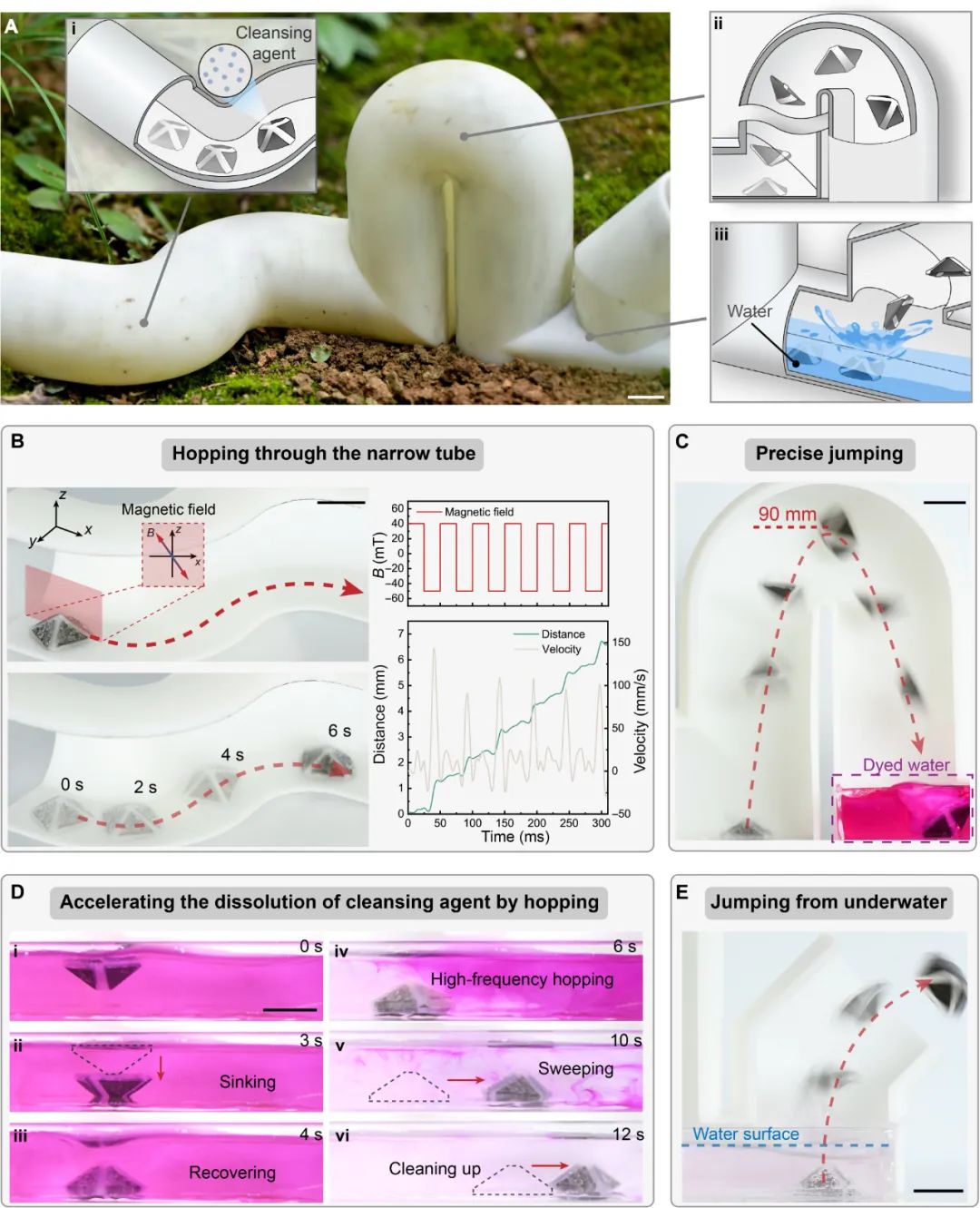
双稳态软跳跃器在管道中的运动
此外,随着材料以及制造工艺的进步,微型化双稳态软跳跃器有望在生物医学领域发挥重要作用。例如,在体内医疗微型机器人中集成双稳态机制,可以大大增强其运动能力和环境适应性。未来,这类机器人可能用于药物输送、组织修复等精准医疗任务。
研究人员表示,除磁驱动外,双稳态概念还可能适用于其他驱动方式的软机器人,如光、热响应形状记忆材料等。此外,通过优化结构和材料参数,可以进一步提升双稳态软跳跃器的性能和稳定性。
结语与未来:
Tang等人开发的磁驱动超快双稳态软跳跃器为软体机器人技术带来了革命性的突破。通过创新的结构设计和磁驱动机制,该机器人实现了高效、快速且可控的跳跃运动。未来,双稳态软跳跃器有望在复杂环境适应性、生物医学领域等方面展现出巨大的应用潜力,并进一步加速商用落地探索。
本文作者可以追加内容哦 !

