当前,机器人已经深入到制造业、服务业、医疗等多个领域,但传统机器人往往采用固定设计。任务模式单一,仅能完成程序设定的固定作业,难以适应多变的任务需求。为了提升机器人的适应性和灵活性,科学家研发了一种可重构模块化机器人。
近日马克斯普朗克智能系统研究学院与科罗拉多大学博尔德分校开发了一种新型六边形电液模块机器人,该机器人可提供高速和高应变驱动。位于六边形刚性板阵列连接处的四个电液执行器驱动六边形从高而窄快速变为宽而短。嵌入在板中的磁铁使模块能够以蜂窝状晶格连接,以实现多模式驱动,例如高冲程肌肉悬挂配置和滚轮状配置。目前该研究成果已发表在《Science Robotics》期刊上。
深度解析HEXEL模块的设计结构与原理
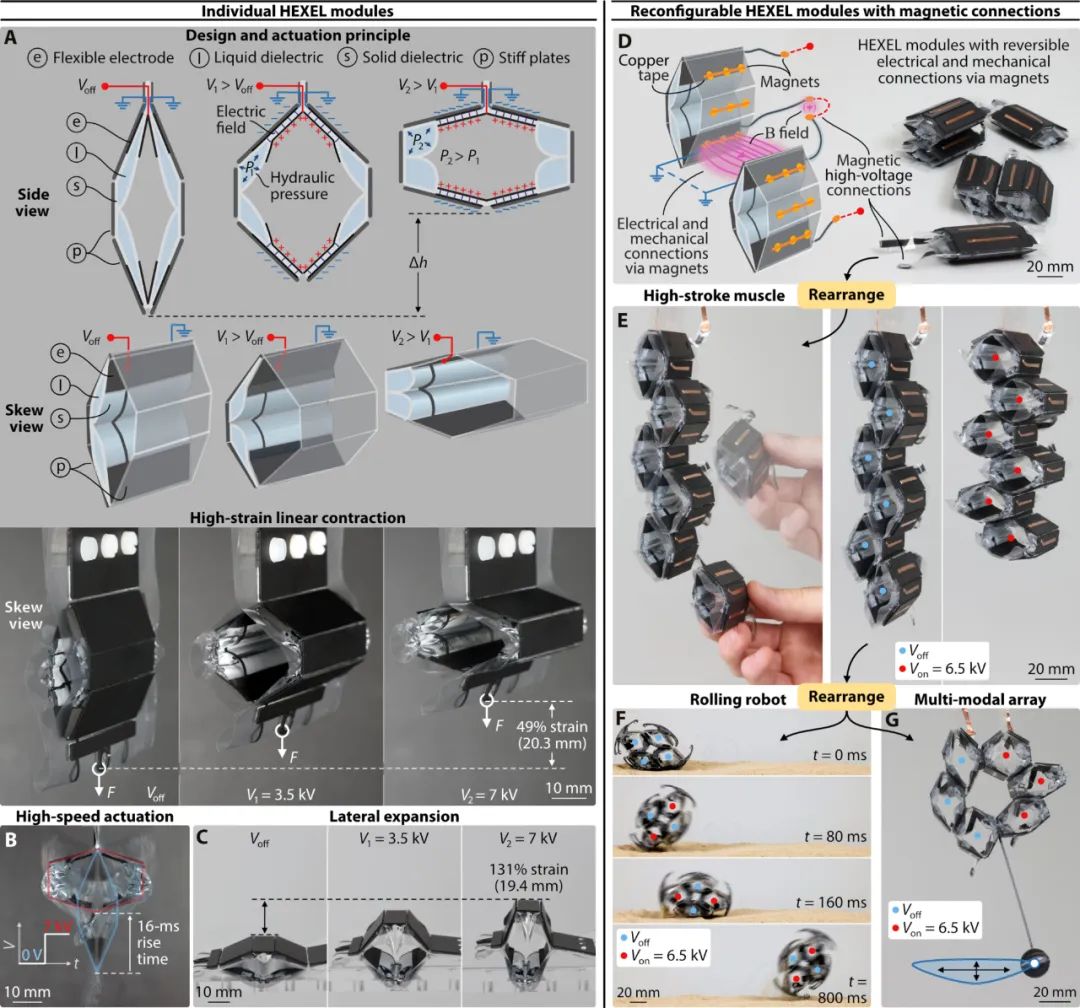
HEXEL模块采用电液驱动技术,与传统的直流电机驱动相比,电液驱动具有更快的响应速度和更高的应变能力。该技术通过向液体电介质施加电压,产生麦克斯韦应力,驱动液体介质在电极之间移动,从而实现快速且可控的形状变化。这种驱动方式不仅高效,而且具有较低的能耗和较高的安全性。
可重构机器人的 HEXEL 模块
此外HEXEL模块的独特设计在于其刚性板和软执行器的协同组合。刚性板组成的六角形外骨骼不仅放大了软电液执行器产生的形状变化,还提供了稳定的机械结构和连接平台。这种设计能够让HEXEL模块在保持灵活性的同时,具备了更强的承载能力和稳定性。
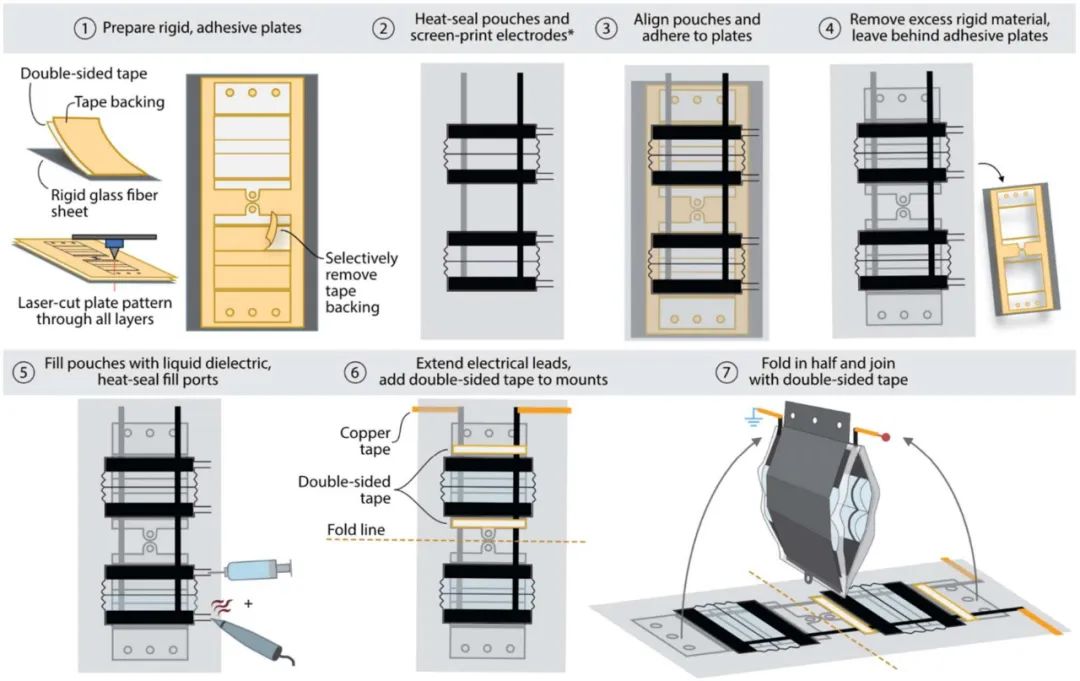
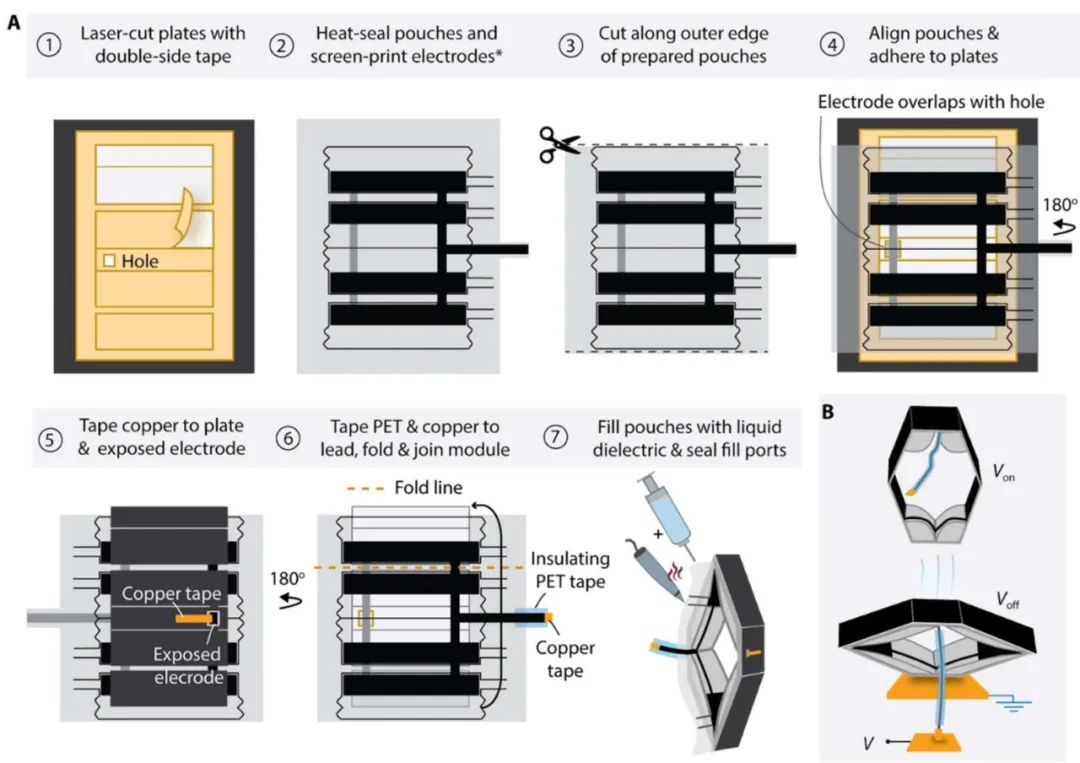
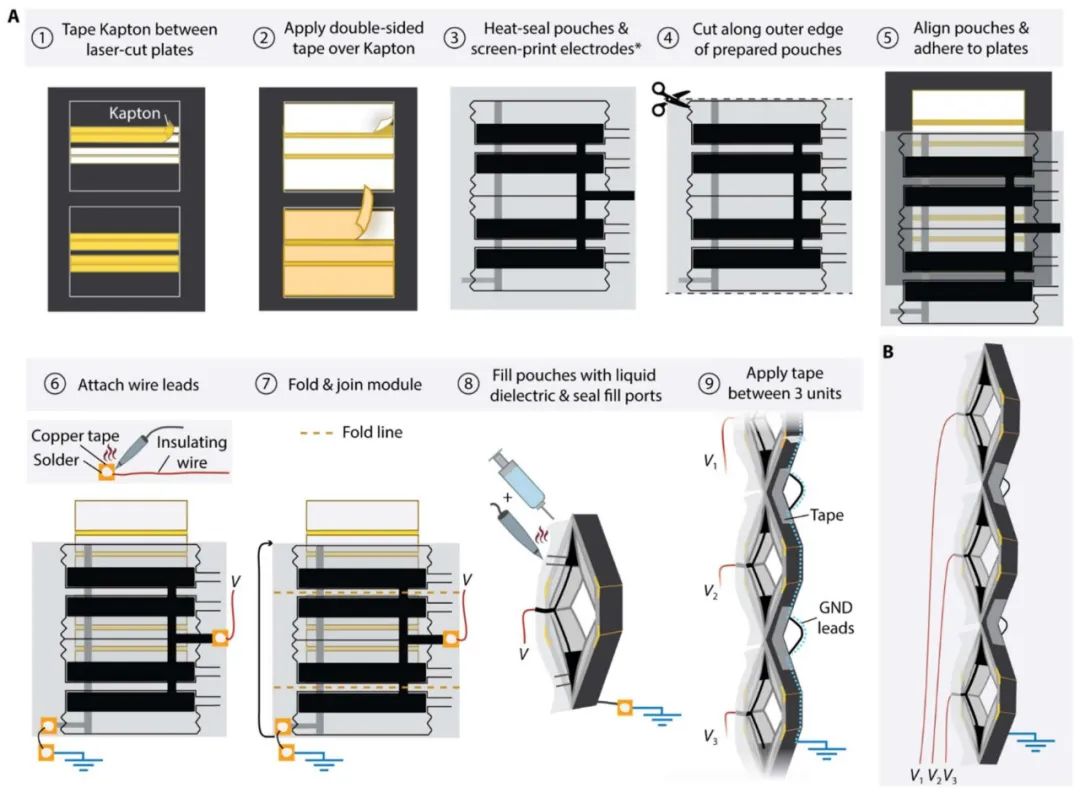
单个HEXEL模块的制造工艺
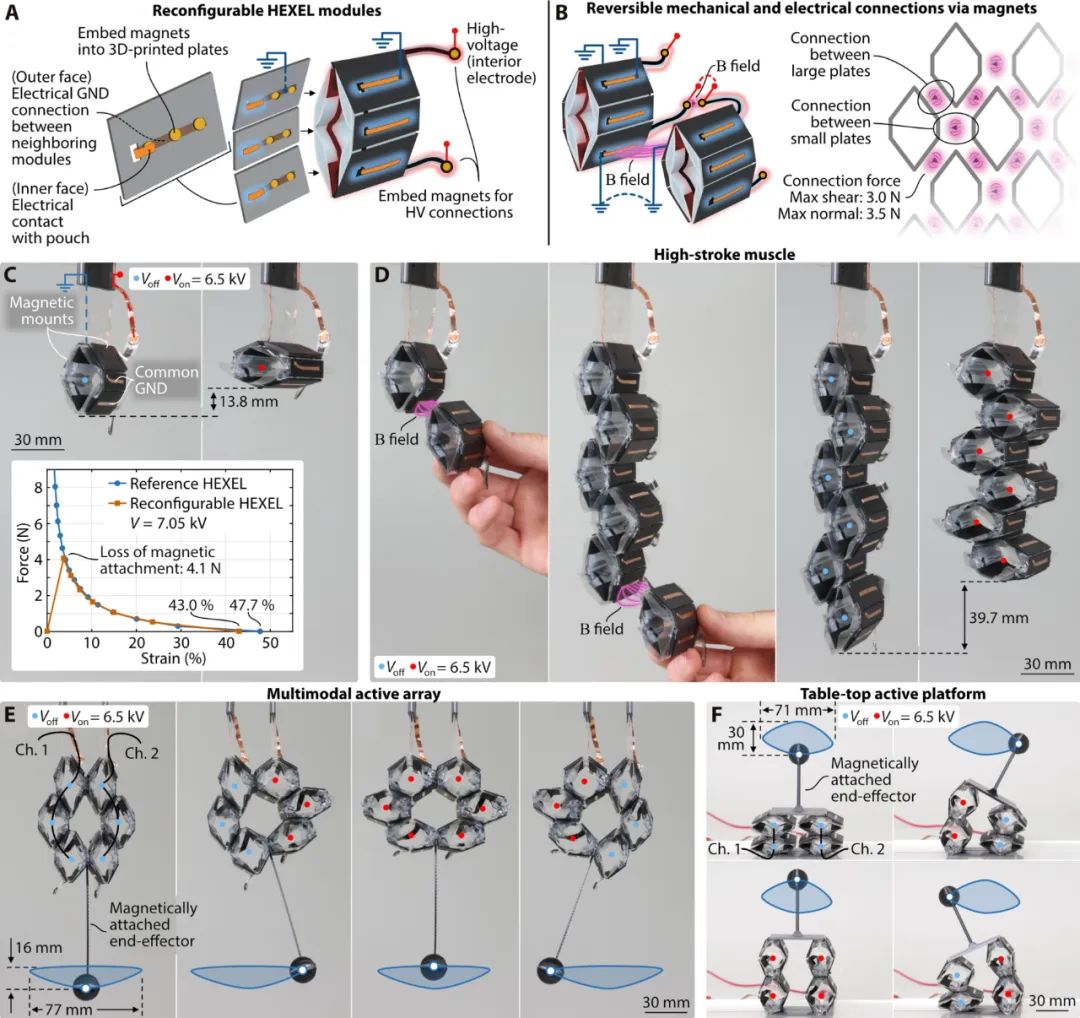
为了实现模块之间的快速可逆连接,HEXEL模块采用了磁性连接方案。磁铁嵌入到模块的硬板和高压电极中,这种设计使得相邻模块之间能够通过磁力迅速吸附在一起,实现机械连接。与传统的机械连接方式相比,磁性连接无需额外的紧固件或工具,操作过程大大简化,显著提高了连接的便捷性。同时,磁铁提供的强大吸力确保了连接的稳定性,即使在动态运动过程中也能保持连接的牢固性。
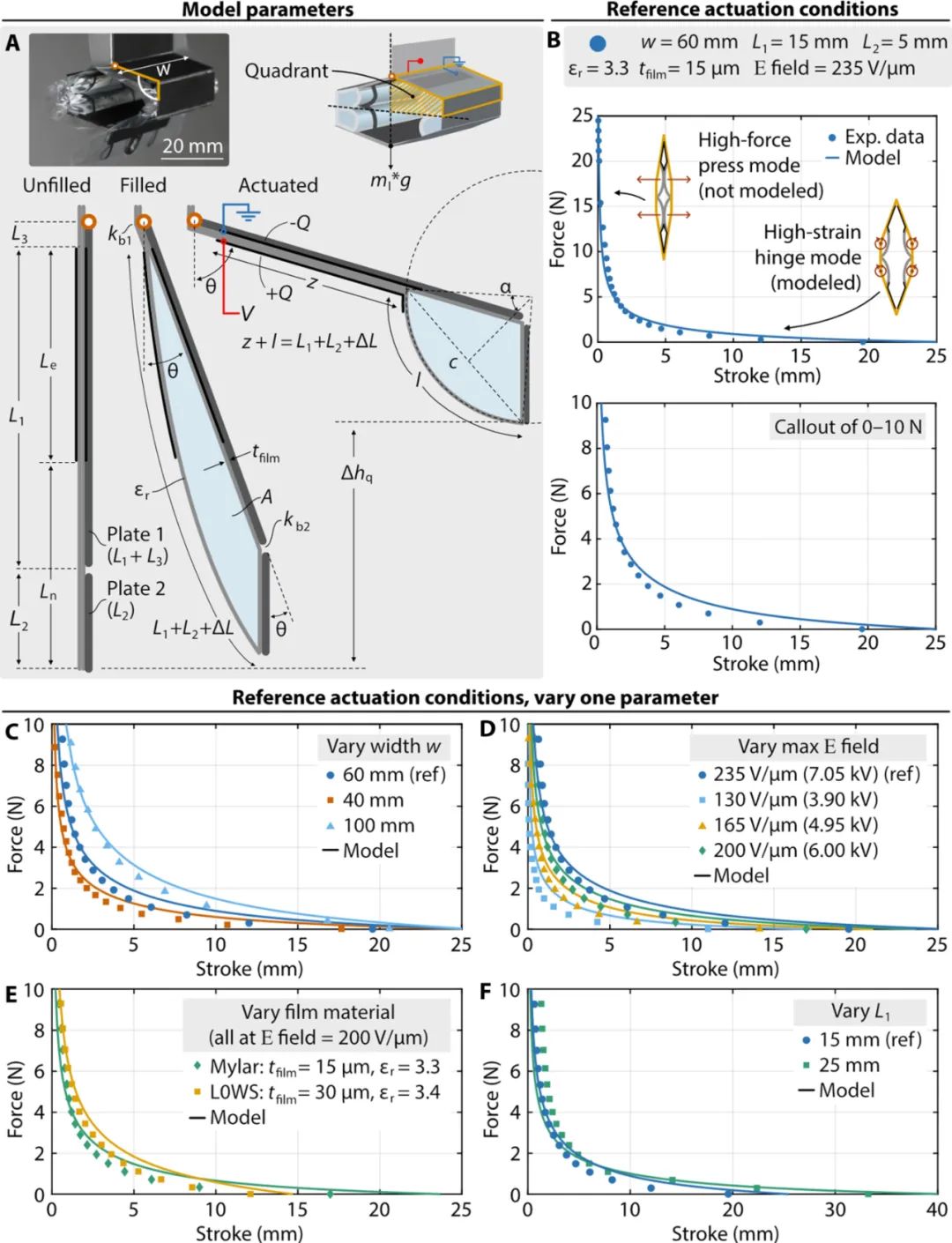
对HEXEL模块的收缩力-冲程行为进行建模
除了机械连接外,HEXEL模块的磁性连接方案还创新地集成了电气连接功能。通过迫使相邻模块的高压电极接触,形成了一个公共的电接地,从而实现了模块间的电气通信和控制。这种设计不仅简化了电路布局,减少了连接线材的使用,还有效降低了系统的复杂性和故障率。此外,由于每个模块的高压都包含在内部电极中,因此可以独立控制每个模块,而不会干扰相邻单元,进一步提升了系统的可控性和稳定性。
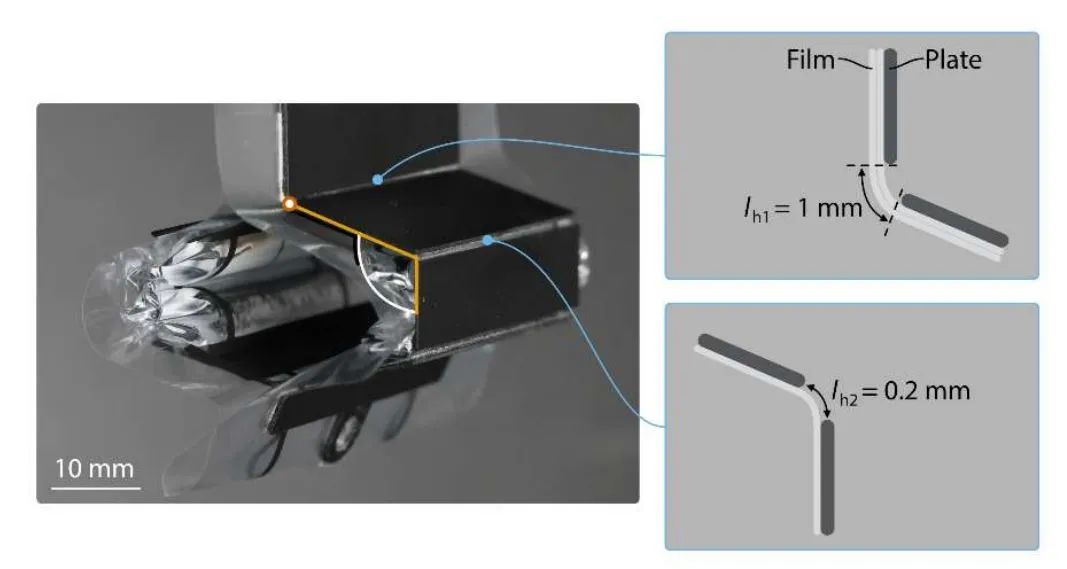
显示薄膜弯曲的两个实例及其尺寸的示意图
磁性连接方案的应用极大地提升了HEXEL模块的可重构性。用户可以根据实际需求快速连接或断开模块,重新组合成不同形状和功能的机器人结构。这种灵活性使得HEXEL模块能够适应各种复杂多变的应用场景,如狭窄空间的探索、动态环境的应对等。同时,由于连接和断开过程简单快捷,用户可以在短时间内完成机器人结构的重构,提高了工作效率和响应速度。
实测HEXEL模块机器人的性能表现
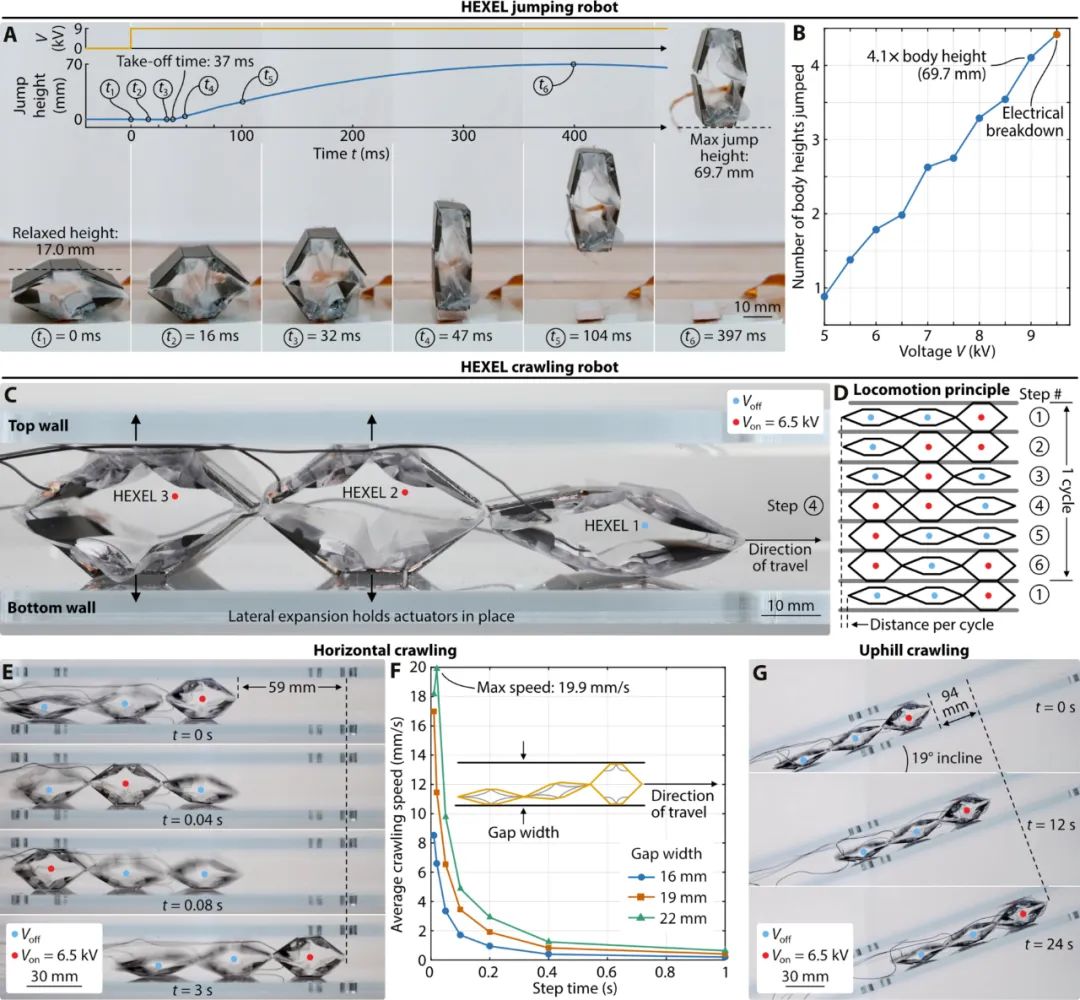
HEXEL模块作为可重构模块化机器人的核心组件,其性能表现直接关系到整个机器人系统的功能和效率。通过电液驱动技术,模块能够在极短的时间内对电压信号做出响应,实现形状的快速变化。实验数据表明,HEXEL模块的峰值收缩应变率可达到每秒4618%,这意味着模块在极短的时间内能够产生明显的形变,为机器人提供了高速运动的基础。此外,模块在方波驱动信号下的上升时间仅为16毫秒,下降时间为41毫秒,这种快速的响应能力确保了机器人在动态环境中的高效运行。
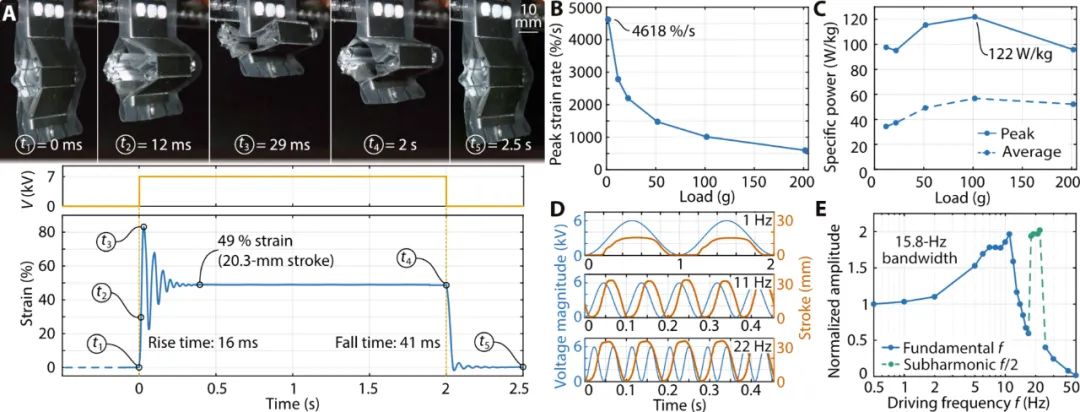
HEXEL模块的动态收缩
此外HEXEL模块还具备出色的高应变性能。在最大电场作用下,模块能够实现49%的自由收缩应变,这意味着模块能够在保持结构稳定性的同时,产生较大的形状变化。这种高应变性能为机器人提供了更广泛的操作范围和更强的适应能力。例如,在需要大行程驱动的应用场景中,HEXEL模块能够轻松应对,实现精准地定位和操作。
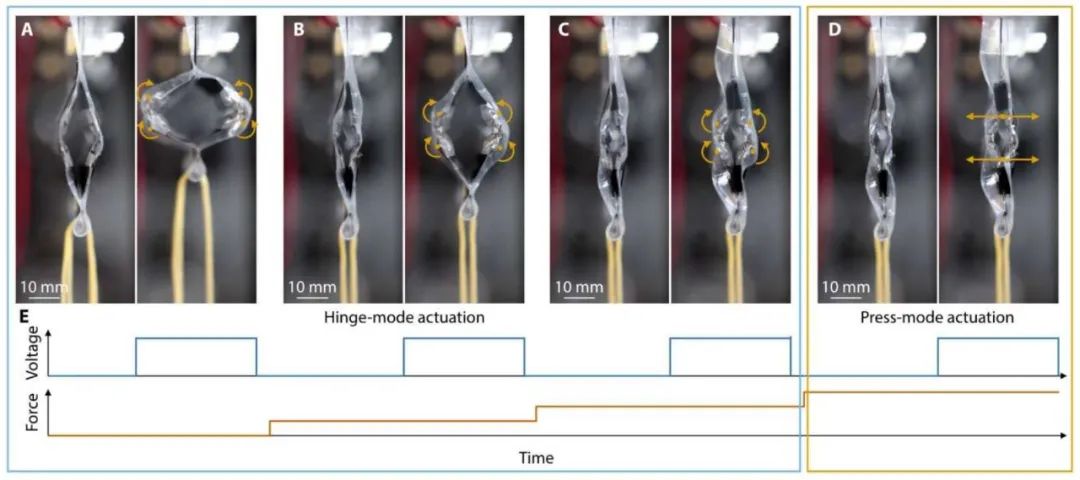
HEXEL模块在低负载下表现出铰链模式驱动
研究人员表示,除高应变性能之外,HEXEL模块在驱动频率方面同样表现出色。实验结果显示,模块的带宽可达15.8赫兹,这意味着模块能够稳定地在较宽的频率范围内工作。该特性使得HEXEL模块能够适应不同的应用场景和驱动需求。无论是在需要快速响应的高频环境中,还是在需要平稳运行的低频条件下,HEXEL模块都能保持稳定的驱动性能。
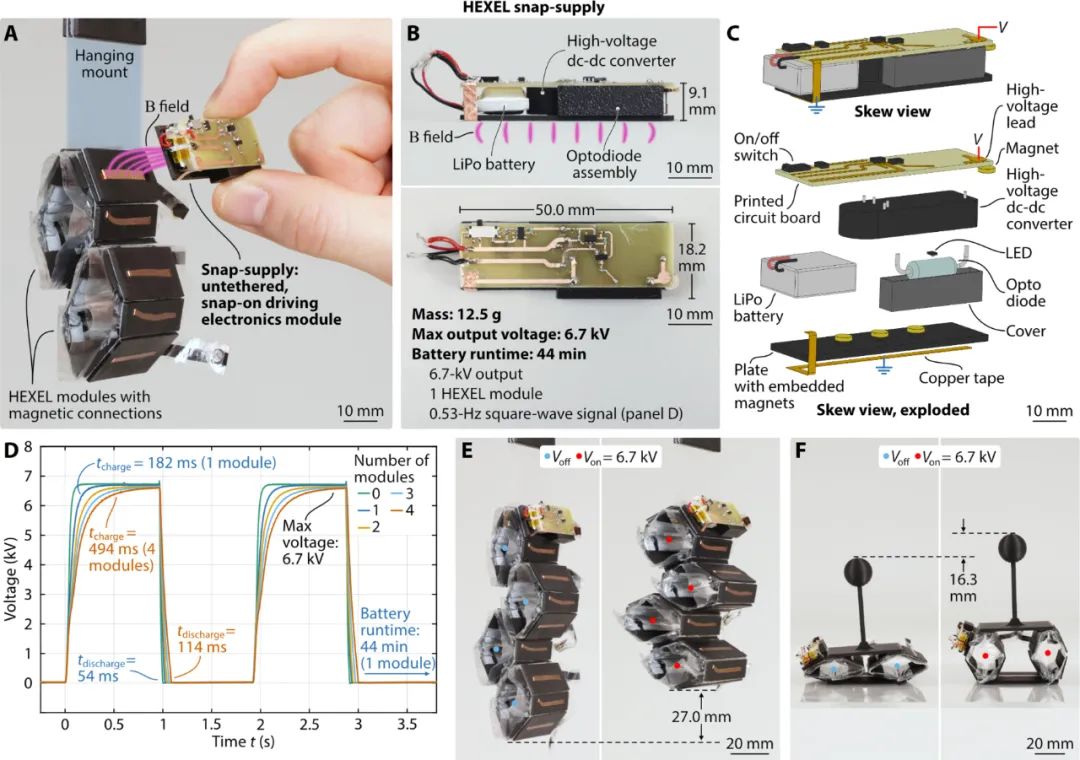
不受束缚的卡扣式驱动电子模块
在模块化与可重构性方面,研究人员表示,每个模块都具备独立的驱动和控制功能,能够轻松与其他模块组合成各种复杂的机器人结构。同时,磁性连接方案的应用使得模块之间的连接和断开变得简单快捷,用户可以根据实际需求快速调整机器人结构,实现多样化的功能和任务。这种模块化与可重构性不仅提高了机器人的灵活性和适应性,还降低了维护和升级的成本。
实验数据显示,在典型工作条件下,HEXEL模块能够稳定运行超过130万次循环而不发生故障。充分证明了HEXEL模块具备极高的耐久性和稳定性,能够在长时间和高强度的使用中保持稳定的性能。此外,模块的设计充分考虑了环境因素对性能的影响,通过采用高质量的材料和精细的制造工艺,确保了模块在各种复杂环境中的稳定运行。
HEXEL模块在多功能系统开发中的应用
利用HEXEL模块的高速驱动性能,研发人员设计了一款跳跃机器人。该机器人通过单个HEXEL模块的快速横向扩张和纵向收缩实现跳跃动作,跳跃高度可达其放松高度的四倍以上。该跳跃机器人具有结构简单、响应速度快的特点,在搜救、勘探等领域具有广泛应用前景。
跳跃机器人的制造工艺
由HEXEL模块驱动的跳跃机器人
此外HEXEL模块还被用于设计爬行机器人。通过多个HEXEL模块的串联和独立控制,爬行机器人能够在狭小空间内实现快速蠕动运动。该爬行机器人不仅能够在平坦地面上快速移动,还能通过增加摩擦力实现上坡爬行等复杂动作。
爬行机器人的制造工艺
具有磁性连接的可重构HEXEL模块
HEXEL模块的磁性连接方案使得多个模块能够快速重组成各种形状和功能的阵列。例如,可以将多个HEXEL模块排列成高行程肌肉、多模态有源阵列和桌面有源平台等。

由可重构HEXEL模块组成的滚动机器人
此外,通过添加磁性附件并重新排列HEXEL模块,研发人员还设计了一款滚动机器人。该机器人利用HEXEL模块的快速形状变化和独立控制能力实现快速滚动和转向动作。滚动机器人在固体表面和复杂地形上的移动速度分别达到267毫米/秒和250毫米/秒,拥有强大的适应性和灵活性。
结语与未来:
HEXEL模块作为一种创新的可重构模块化机器人设计,未来有望在制造业、服务业、医疗等多个领域发挥重要作用。随着材料科学以及模型控制技术的发展,HEXEL模块的性能将得到进一步提升。如材料科学与驱动技术的进步,HEXEL模块能够实现更高的驱动速度、应变能力和稳定性,此外通过集成更多的传感器、通信和计算组件,也能够实现更高级别的自主控制和智能化决策,商业化潜力巨大。
本文作者可以追加内容哦 !

