盖世汽车讯 创新的全球导航卫星系统(GNSS)定位技术利用大量车辆生成的数据来创建高分辨率大气延迟校正地图,从而显著提高全球定位系统(GPS)在不同空间尺度上的精度。这种新方法利用实时、众包的车辆GNSS原始数据,改进了传统的GPS应用,并提供了一种经济高效的精确定位解决方案。
受当前大气校正模型的局限性影响,GNSS精度提高始终受阻,因为这些大气校正模型依赖于稀疏、高成本的基础设施。这些传统模型难以提供精确定位所需的高分辨率数据,尤其是在自动驾驶等动态环境中。这项研究的出现解决了这一挑战,通过提出一种众包方法来生成详细的大气地图,有望显著提高GNSS性能并降低成本。
据外媒报道,中国科学院(Chinese Academy of Sciences)的研究人员开发出创新GNSS定位框架,并已发表于期刊《Satellite Navigation》。该研究详细介绍了一种系统,即使用双基站和众包大气(Crowdsourced Atmospheric)延迟校正地图(CAM),以实现高精度定位,这对于自动驾驶和物联网(IoT)等应用来说是一项重大进步。
图片来源:期刊《Satellite Navigation》
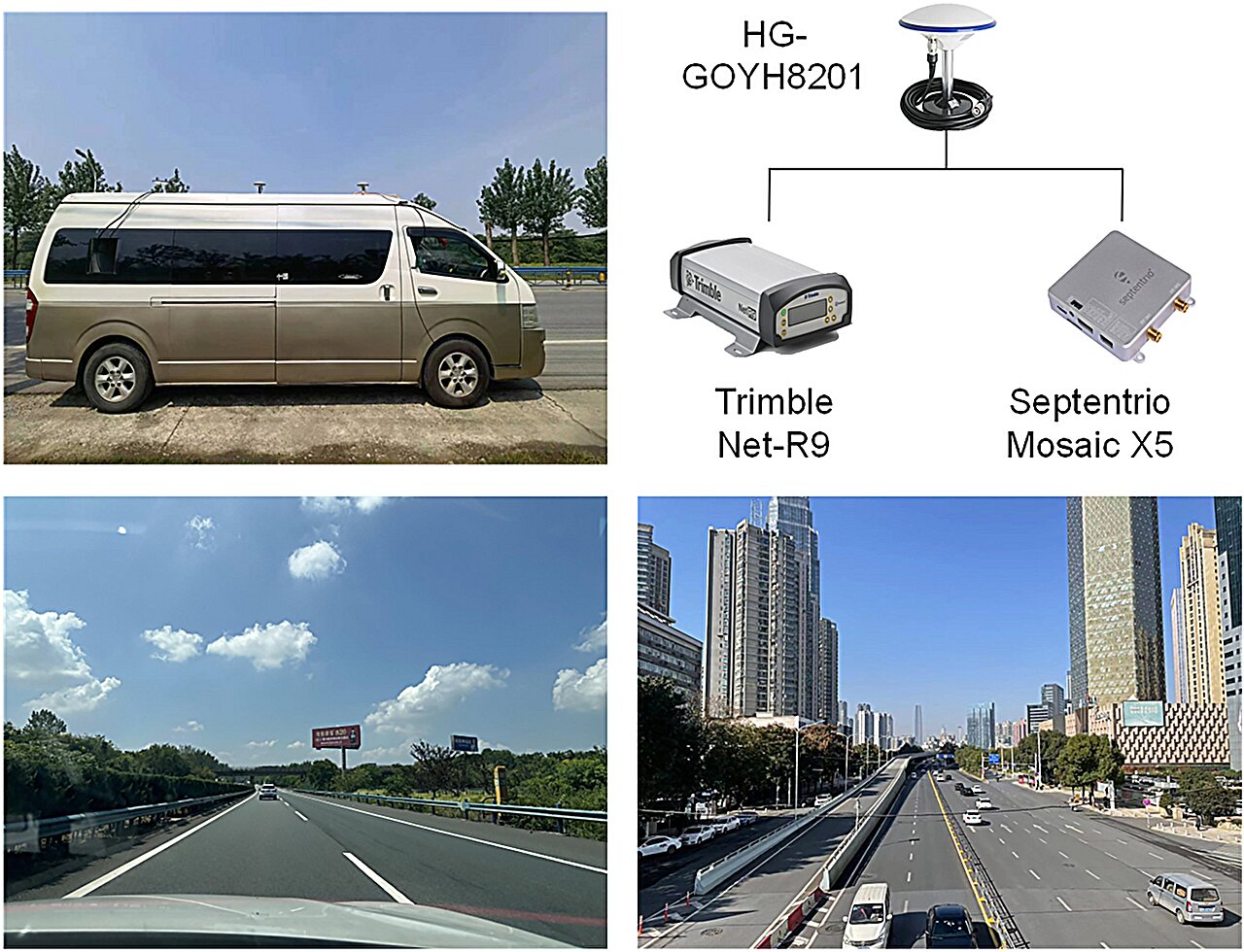
该研究引入了一种新颖的GNSS定位框架,利用双基站和大量车辆数据来生成高分辨率大气地图,从而提高GNSS的精度。这种众包方法称为CAM,利用配备GNSS接收器的车辆的数据。
这些车辆收集大气延迟数据并将其传输到云服务器,在云服务器中对其进行集成和处理,以不断更新CAM。这种动态更新过程可以实时提高CAM的空间分辨率和公共用户的定位精度。该框架的核心创新在于使用了通用车辆GNSS数据,与传统数据源相比,这些数据更加丰富且易于获取。
通过汇总和优化这些数据,该研究实现了生成详细大气延迟校正的经济高效的方法。CAM大大减少了对传统用于大气数据的昂贵且分布较少的连续操作参考系统(CORS)站的依赖,提供了一种可扩展的解决方案,可提高精密GNSS应用的可行性和准确性。
首席研究员袁运斌博士表示:“该框架不仅降低了大气数据收集的成本,而且显著提高了GNSS定位的准确性和可靠性,标志着基于位置服务的重大飞跃。”
该技术的应用范围不仅限于提高全球定位系统(GPS)的精度,还为实时环境监测开辟了道路,对城市规划、交通和应急响应系统具有重要意义。随着车辆成为数据收集中心,该技术的可扩展性有望带来广泛的社会经济效益,特别是在高度城市化的地区。
本文作者可以追加内容哦 !

