非接触式的位姿跟踪技术当前在多个领域展现出广泛的应用潜力,特别是在虚拟现实、人机交互、医疗康复以及机器人辅助的医疗干预中。以微创手术为例,该技术能够实现对手术工具的精确位姿跟踪,为医生提供直观的视觉指导,从而显著提升手术的准确性和安全性。
然而,尽管非接触式的位姿跟踪技术具有诸多优势,但传统的定位跟踪方法仍面临一系列挑战。光学定位、X射线定位、射频跟踪等方法在实际应用中,常常受到视线遮挡、辐射危害以及精度不足等问题的困扰,这些问题严重限制了它们在体内医疗器械定位跟踪领域的进一步应用。

来源:https://www.ndigital.cn/
为解决这些难题,磁定位技术作为一种非接触、无遮挡的位姿跟踪方法,逐渐受到关注,并被越来越多地应用于跟踪体内工作的医疗器械或设备,如胶囊内窥镜和柔性机器人。然而,磁定位技术也并非尽善尽美。传统的基于电磁定位的系统需要传感器跟随待估计目标移动,这使得无线跟踪难以实现。而基于永磁体磁源的跟踪系统则易受环境电磁场的干扰,且其跟踪自由度有限,仅能实现五自由度(即3个位置自由度和2个旋转自由度)的跟踪,这在一定程度上制约了其应用范围的拓展。
来自华南理工大学王恒副教授团队的研究人员针对这一问题进行了深入研究,并于前不久提出了一种新型的基于软磁体的六自由度无线磁定位系统。该系统巧妙结合了电磁定位与永磁定位的双重优势,利用电磁铁作为激励磁源,并采用三轴各向异性软磁体作为敏感元件,不仅实现了三自由度的姿态估计,更突破性地完成了全六自由度的位姿跟踪。
这一系统的核心优势在于,即便作为单个、无源的被动器件,该系统也能实现六自由度的精准跟踪,并且具备抗低频磁场干扰的能力。研究团队对软磁跟踪系统的六自由度位姿跟踪传感原理进行了深入的分析建模,并通过实验进行了验证,展示了软磁体对六自由度运动的高度非线性磁响应,并训练了神经网络模型,以直接从磁测量中估计位姿。这不仅解决了基于永磁的系统只能进行两自由度方向跟踪和难以抗干扰的长期问题,还为医疗等领域带来了全新的应用前景。

该研究相关论文已经以“A Wireless 6-DoF Pose Tracking System Using a Triaxially Anisotropic Soft Magnet”为题发表在《IEEE/ASME Transactions on Mechatronics》。华南理工大学吴贤铭智能工程学院为论文通讯单位,博士生刘骕骐为论文第一作者,王恒副教授为论文通讯作者。
那么,这项研究具体是怎样的呢?接下来,和机器人大讲堂一起来深入探索吧!
基于软磁体的位姿跟踪基本原理
在磁场测量与跟踪技术领域,软磁体作为一种特殊的铁磁性材料,正逐渐展现出其独特的魅力。这种材料具有高磁导率、低矫顽力的特性,使得它在外部磁场的作用下容易被磁化,并在撤去外部磁场后迅速退磁。这一特性为磁场测量和跟踪提供了全新的可能。
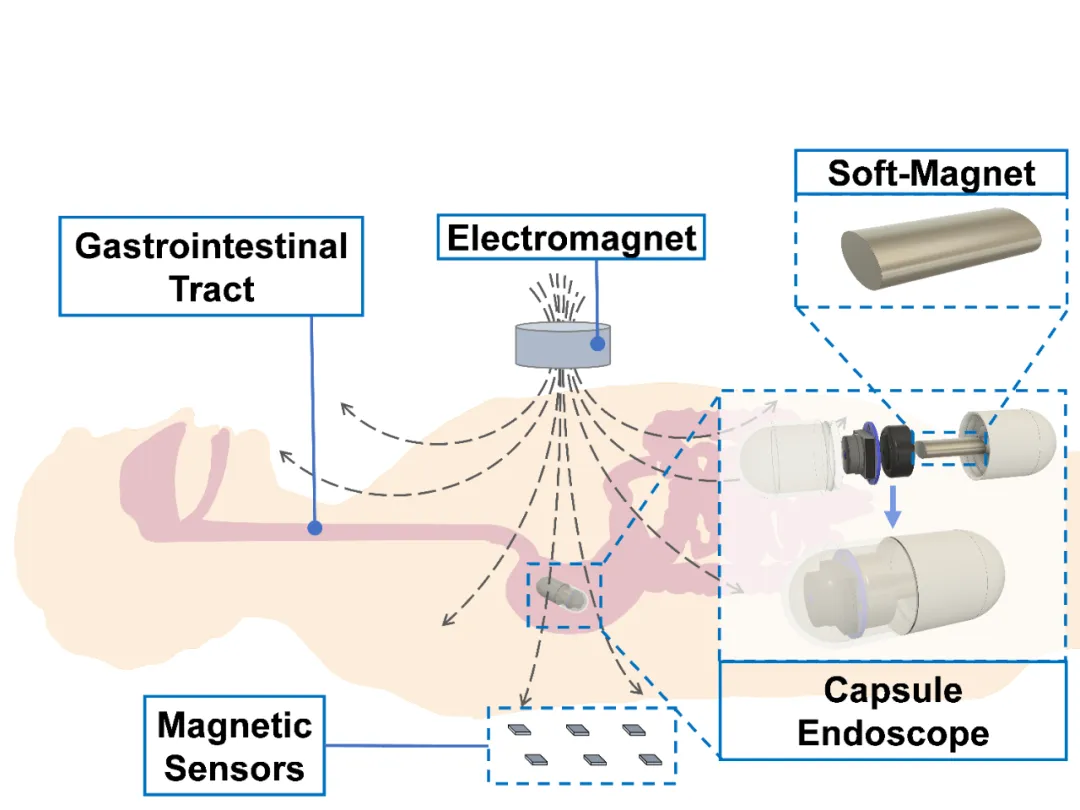
如图1所示,电磁铁主磁源产生的磁场在空间中分布不均匀。研究人员发现,当软磁体在空间中运动时,由于所受到的磁化磁场不均匀,其被磁化后所形成的磁矩也会发生变化。这一变化使得传感器能够测量到软磁体磁场的响应变化,从而实现对软磁体的位姿跟踪。这一技术的实现主要依赖于两个关键因素:首先是软磁体相对于电磁铁的位姿变化,这会导致磁化它的当地磁场发生变化,进而造成软磁体磁矩的变化;其次是软磁体相对于传感器的位姿变化,这直接决定了传感器测量到的软磁体磁场。
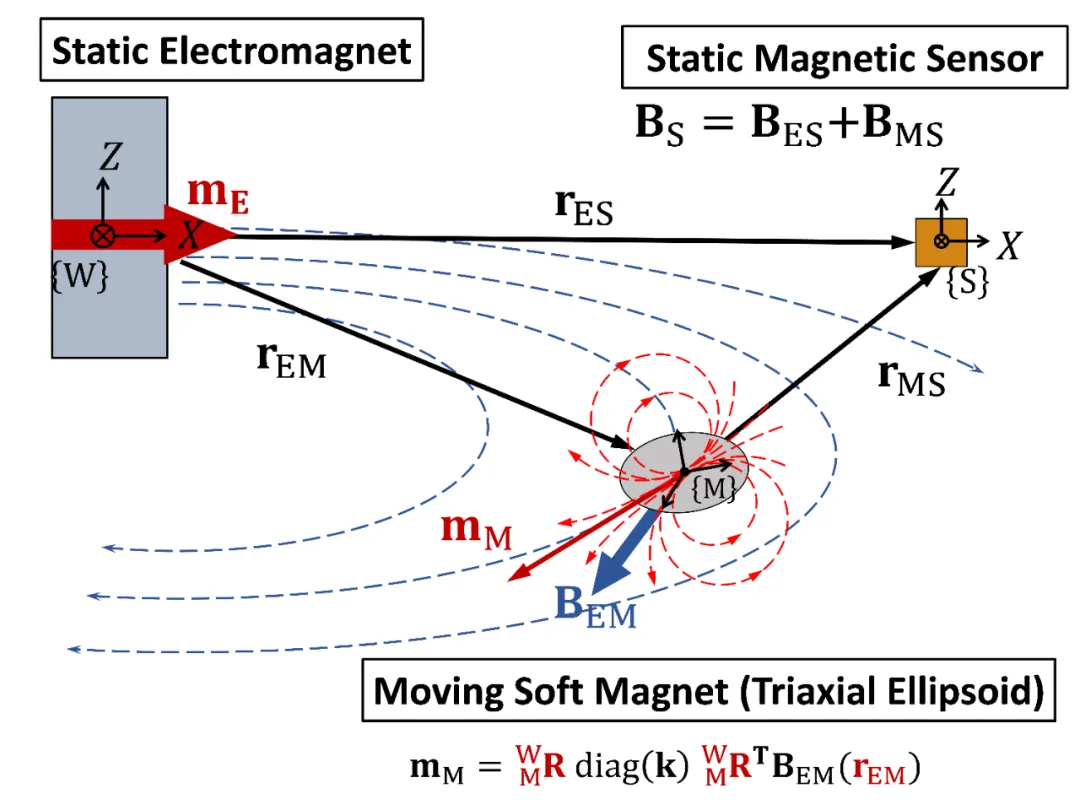
图1 基于软磁体的位姿跟踪原理。
在团队的前期工作中,研究人员已成功利用软磁体实现了一维线性定位[2]、一维角度测量[3]以及三维位置跟踪[4],并验证了这种新型磁跟踪技术在抵抗铁磁性干扰等方面的潜力[5]。然而,以往的研究仅限于实现三自由度位置估计,未能涵盖姿态估计,因此尚未达到全六自由度的位姿跟踪能力。
三轴各向异性的软磁体实现姿态跟踪
图2展示了永磁体、球形软磁体和三轴各向异性的椭球形软磁体在旋转过程中的磁矩变化。永磁体因其较强的矫顽力,在旋转时磁矩总是跟随其旋转,但当旋转轴是磁矩主轴(图中的)时,由于对称性,其磁矩方向不会发生变化,导致对该旋转方向的姿态跟踪缺失。相比之下,球形软磁体由于其几何对称性,被磁化后的磁矩不受旋转影响(图2(b)),因此也无法实现姿态跟踪。
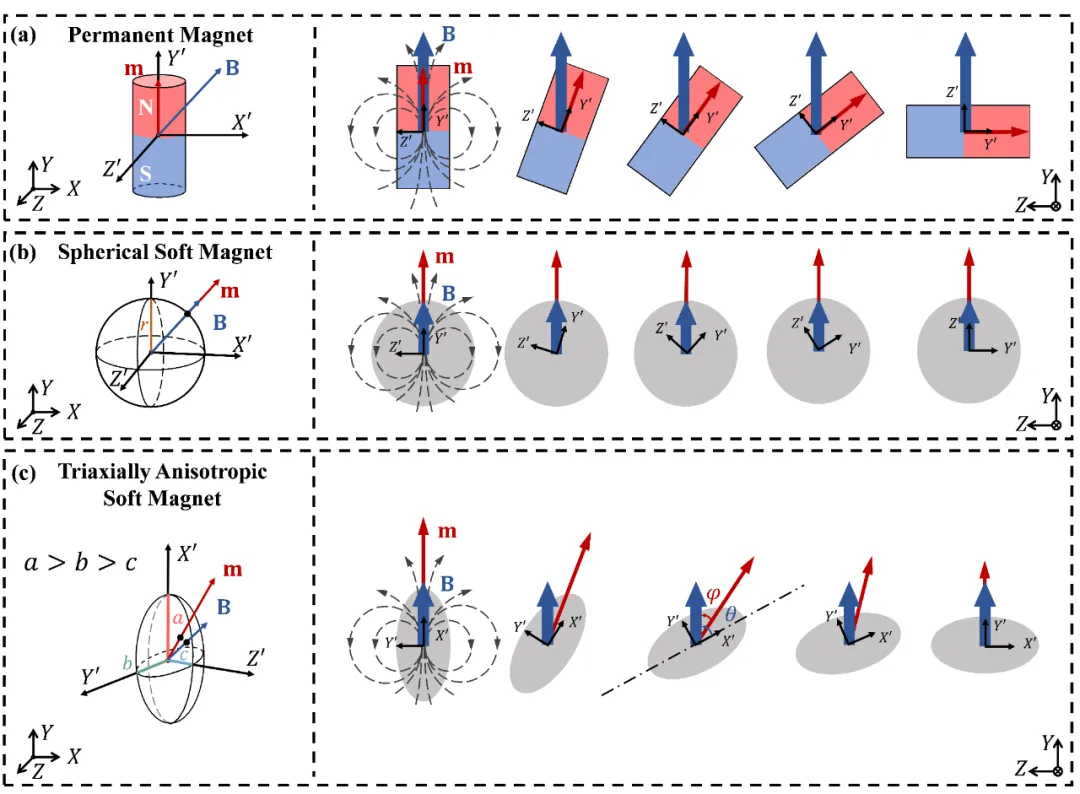
图2 不同磁性敏感元件磁矩随姿态的变化情况。(a) 永磁体;(b)球形软磁体;(c) 三轴椭球形软磁体。
然而,当软磁体被制成三轴各向异性的几何形状时,如图2(c)中的椭球体,其磁矩变化特性发生了显著改变。当磁化磁场方向与几何体的对称轴共线时,其磁矩与磁化磁场方向相同。但当软磁体旋转时,其磁矩与磁化磁场之间会形成一个偏移夹角,这个夹角随软磁体的旋转先增大后减小。当旋转至90时,由于磁化磁场再次与对称轴共线,夹角再次为零。此时,由于椭球体的半轴长不同,其磁化后的磁矩虽然与磁化磁场方向相同,但模长不同。这一特征在另外两个几何剖面也同样成立。因此,三轴各向异性的椭球形软磁体不仅能够实现位置跟踪,还能够实现三自由度的旋转姿态跟踪。
磁场测量模型验证
磁场测量模型阐述了各向异性软磁体的六自由度位姿与磁场测量值之间的内在联系,而准确建模这一关系是估算软磁体位姿的关键。
基于磁偶极子模型,研究人员构建了软磁体磁场测量值与其六自由度位姿之间的解析模型。同时为了验证这一解析模型的有效性,分别在固定姿态下进行平移运动,以及在固定位置进行旋转运动的两种场景下,采集了磁场测量数据。具体来说,对于沿X轴、Y轴和Z轴的平移运动,模型拟合的决定系数(R)分别达到了0.870、0.898和0.922;而对于绕Z轴、Y轴和X轴的旋转运动,模型拟合的决定系数(R)则分别为0.862、0.792和0.864。这些结果表明,所建立的解析磁场测量模型与实测磁场数据之间具有较高的吻合度,从而验证了利用三轴各向异性软磁体进行位姿跟踪的物理原理的可行性。
软磁跟踪系统性能实验与评估
为了全面评估所提出的软磁跟踪系统的性能,研究人员开展了一系列实验,包括三自由度姿态跟踪实验、六自由度位姿跟踪实验以及抗干扰性能验证实验,从不同角度和不同场景下对该系统的性能进行了深入测试和评估。
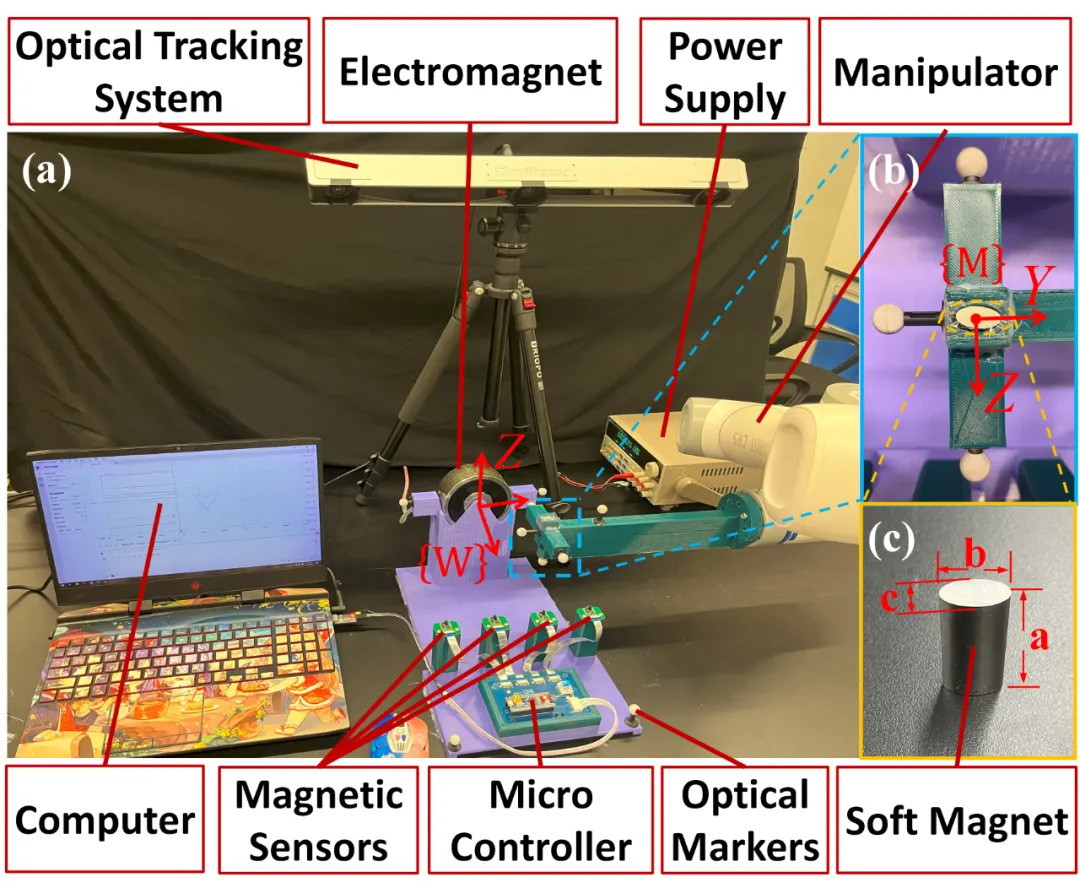
图3 (a)基于软磁体的姿态跟踪系统的实验设置。(b)机械手末端执行器上的连接器,以固定软磁铁。(c)软磁体与几何形状的椭圆圆柱体。
三自由度姿态跟踪实验
为了验证所设计的各向异性软磁体的姿态跟踪能力,研究人员首先在定点旋转的情形下对软磁体进行了三自由度姿态跟踪实验。由于只要三个主轴的几何尺寸不同,就存在软磁体的三轴各向异性磁化,因此任何具有不等长三轴的几何体(如椭球体、椭圆柱、长方体等)都可实现三自由度姿态跟踪。为了简化制造过程,实验中选择了几何形状为椭圆柱的软磁体来代替三轴椭球体。实验结果显示,偏航角、俯仰角和横滚角的方均根跟踪误差分别为4.57、2.41和4.20,平均姿态跟踪误差为3.73,这表明该系统能够实现较准确的姿态跟踪。
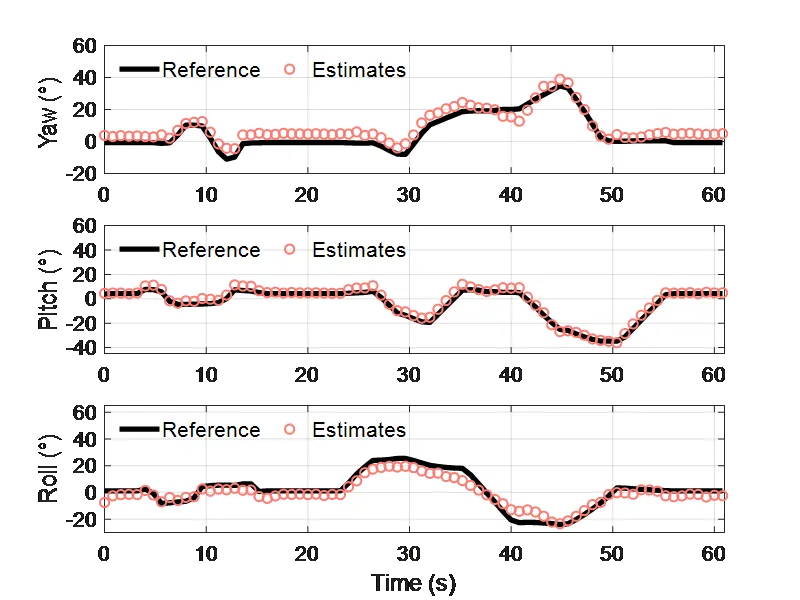
图4 软磁定位系统的姿态估计结果。
六自由度位姿跟踪实验
在六自由度位姿跟踪实验中,整体的测试轨迹如图4所示,包括两段直线与两段圆弧,整体长度约230mm。软磁体沿测试轨迹运动时,其三自由度姿态同时发生变化。从结果来看,基于软磁体的六自由度定位系统的平均位置跟踪误差为5.83mm,平均姿态跟踪误差为2.72,实现了对六自由度位姿的有效跟踪。但在工作空间的边缘区域,如P2点,由于磁场强度较弱,测量的灵敏度较低,因此跟踪误差相对较大。
,时长01:22
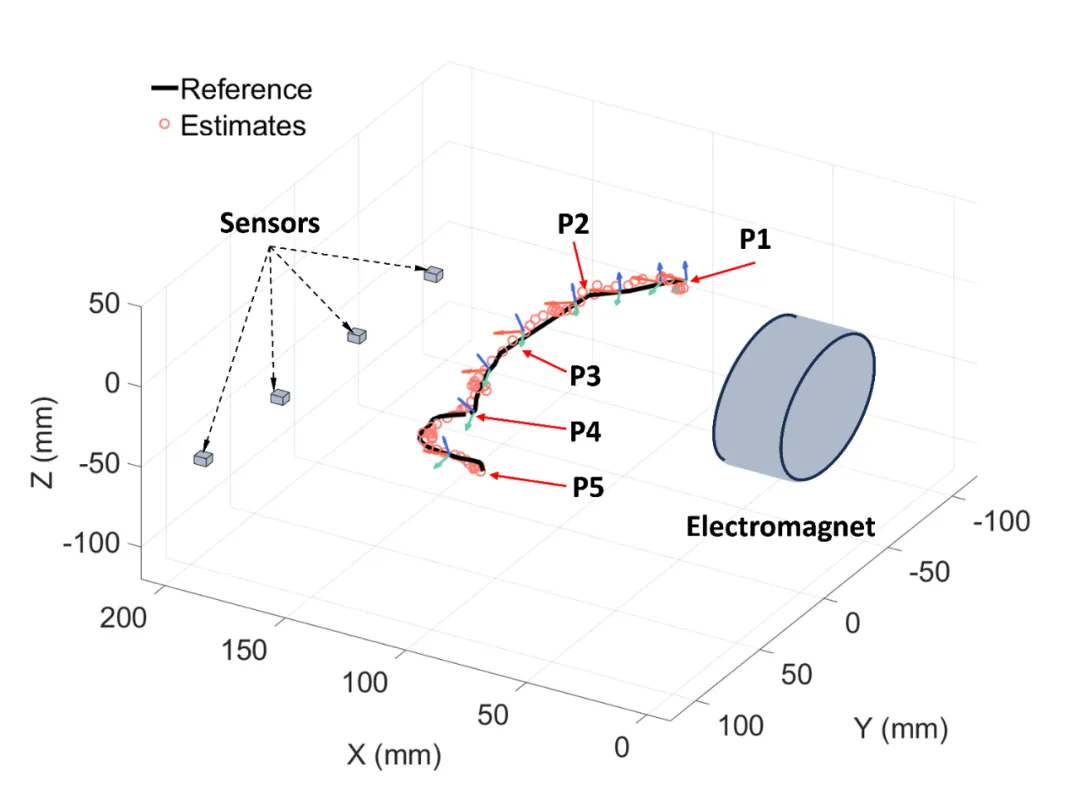
图5 六自由度位姿跟踪的测试轨迹与跟踪结果
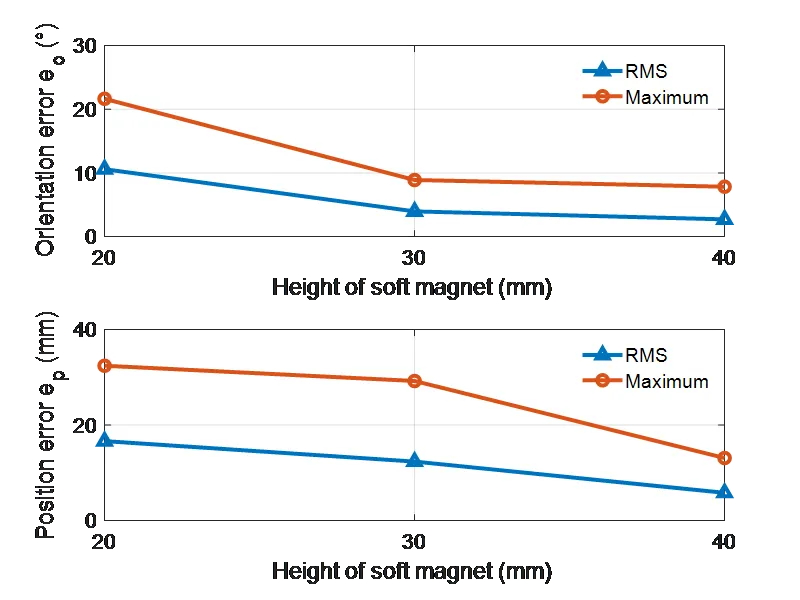
此外,研究人员还对具有相同三轴尺寸比例但不同体积的软磁体的跟踪效果进行了探究。结果表明,由于软磁体磁化后的磁矩大小与其体积成正比,因此体积较大的软磁体能够得到较小的跟踪误差。在实际应用中,则需要权衡软磁体体积与测量精度之间的关系。
抗干扰性能验
为了验证基于软磁体的磁定位系统的抗干扰性能,研究团队还将软磁定位系统与永磁定位系统进行了对比实验。在这个测试中,研究人员在定位系统的工作区域附近放置一块永磁体作为干扰源。结果表明,基于软磁体的磁定位系统能够有效抵抗如永磁体等铁磁性物体带来的低频磁场干扰。而永磁定位系统无法抵抗磁干扰,位姿估计出现发散。
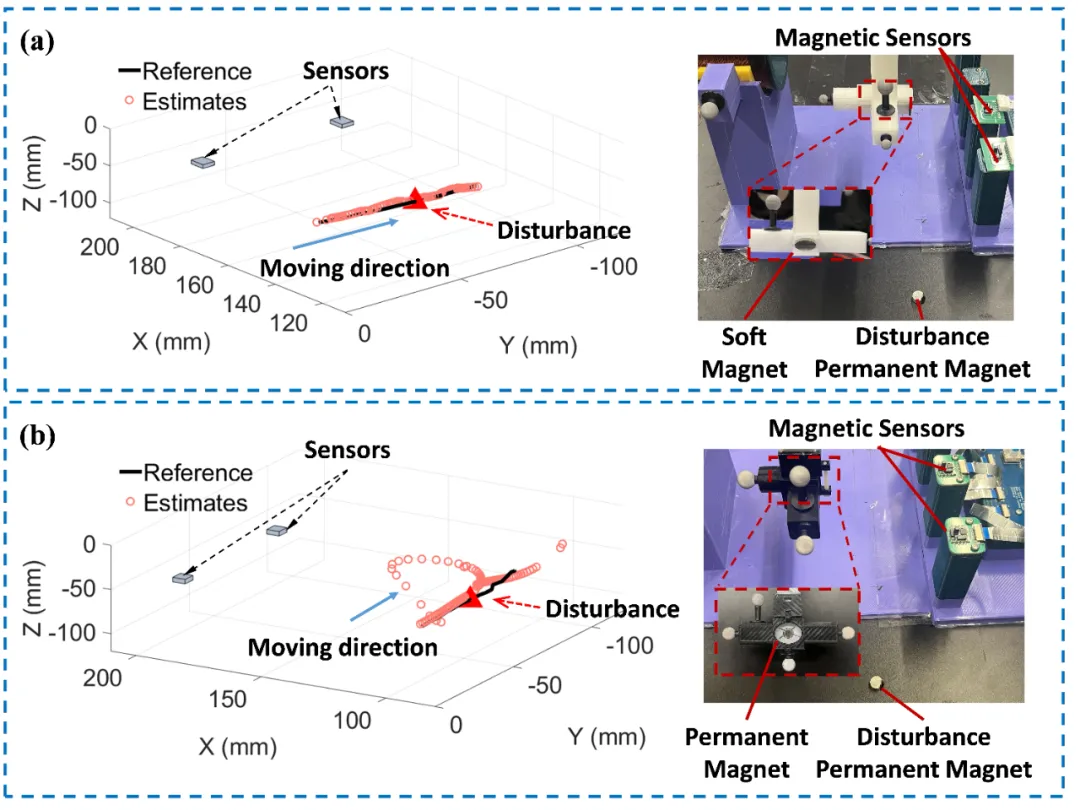
图7 永磁体干扰下的位姿跟踪结果。(a) 软磁定位系统 (b) 永磁定位系统
关于未来
研究团队提出的“基于软磁体的六自由度无线磁定位系统”这一创新成果为磁定位系统在医疗机器人定位领域的应用开辟了一条全新的路径。
目前来看,这一新型的磁定位系统仍存在诸多不足和挑战,需要进一步的优化和完善。例如,由于系统的中心对称性限制,目前的旋转姿态跟踪仅能在180范围内进行,这在一定程度上限制了其在更广泛场景下的应用。同时,磁化软磁体的磁场响应相对较弱,导致现有的有效工作空间和位姿跟踪精度与实际应用需求之间仍存在一定的差距。
因此,研究团队未来将致力于突破这些技术瓶颈,以期进一步提升系统的性能和实用性,推动其在医疗机器人定位等领域的广泛应用。
本文作者可以追加内容哦 !

