大家都知道传感器属于精密仪器,没有人舍得拿锤子去砸它。大家再看视频中宇立生产的传感器。拿20kg的砝码在一米的高度砸下去,性能还能完好无损。那宇立为什么可以把过载能力做的这么强还完好无损呢?听我来给你往下讲。
六维力传感器的主要性能参数包括:量程、过载能力、分辨率、非线性、迟滞、串扰、电气接口等几个方面。
ISO组织用非线性、迟滞、串扰来表征六维力传感器。国际头部传感器企业在其产品说明书中都有注明。过载能力和分辨率是机器人行业六维力传感器另外两个重要指标。过载能力表征了传感器抵抗超量程使用的能力,分辨率表征传感器的灵敏程度。两者往往是矛盾的,过载能力大分辨率就低,分辨率高过载能力就小。目前传感器头部厂商宇立仪器就解决了此问题。传感器拥有超高分辨率的同时也兼并超高过载能力。
宇立仪器高精度型传感器能做到6-10倍过载,厚度仅9.2mm的超薄型系列也可以实现2倍过载,最高竟然可以做到15倍的瞬时过载而不损坏传感器,是业内当之无愧的领军者。 如今,对于人形机器人的脚踝等肢体而言,六维力传感器的长期可靠性是不能作让步的核心性能,这使得高刚性和抗过载能力也开始成为考核六维力传感器是否能够满足机器人越发复杂场景要求的核心性能,在这些关键性能上,宇立仪器正以超前的布局,得到用户认可和欢迎。

宇立仪器传感器抗过载能力优势明显,尤其人形机器人在新场景开拓过程中的需求,正在加速对于六维力传感器抗过载能力的要求。现如今,人们不仅希望人形机器人能走得更稳,还开始希望人形机器人在需要承受较大负载的应用场景中工作,类似搬运重物、执行高强度作业等,又例如在极端环境或危险场景下工作,如高温、高压、强辐射等,需要保护机器人免受损害的同时确保任务的顺利进行。而这意味着使得六维力传感器必然同时需要兼具高刚性、强大的抗过载能力和温度灵敏度漂移控制能力,以及长期可靠性。

不少人形机器人企业在手部和指尖就搭载了宇立仪器的六维力传感器,借助其产品优秀的抗过载能力和测量性能,帮助机器人在转移物品的过程中感知和调整力度,确保物品的平稳过渡,使得人形机器人能够感知并调整握力,避免对易碎物品造成损害,还能够控制瞬时较大的输出扭矩,流畅地将重物从一只手转移到另一只手,实现精细操作。
还有一些企业在人形机器人足部搭载宇立的六维力传感器,因为人形机器人大多自重较大,人形机器人的脚踝同样需要承受超出其自身的重量,当机器人需要调整行走速度,就对于足部六维力传感器抗过载能力提出了更显著的要求。六维力传感器需要能够承受超出其额定量程的力而不发生损坏,并保持一定的测量精度和动态响应能力,同时需要频繁切换抗过载环境,多个关节协同工作,保持身体的平衡。
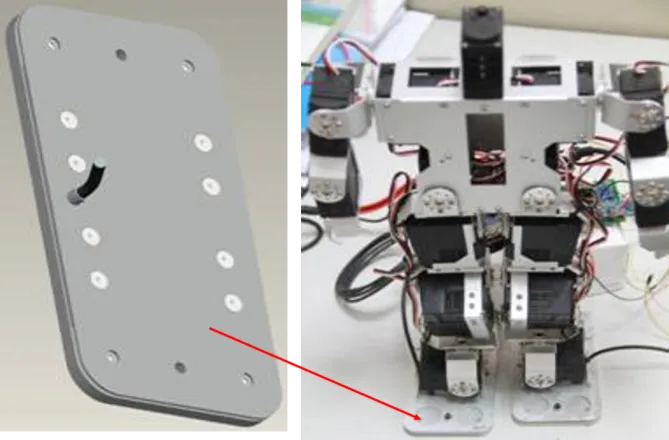
宇立的六维力传感器能帮助人形机器人感知地面的质地和凹凸不平,快速调整步伐和保持平衡,具备适应不同环境和工况的能力。2015年宇立的4维力传感器就开始被用于2kg重的小机器人足底,2018年还用于韩国一款4m高的大机器人上,证明了宇立传感器的可靠性能。
随着机器人场景愈发复杂,作为关键感知部件的六维力传感器过载能力的强弱直接关系到机器人的性能、安全性以及使用寿命,越来越多厂商采用着宇立抗过载能力较强的六维力传感器产品,希望进一步提升机器人的安全性和稳定性,增强机器人等产品的环境适应性。
以工业和协作机器人为例,在目前的柔性化需求下,协作机器人负载提升到30kg级别及以上,传感器大多时候需要能够实时监测机器人所承受的负载,过载能力弱的传感器在频繁受到超出其设计量程的力时,可能会产生非线性输出或完全失效,内部元件可能会加速磨损或损坏,导致机器人无法准确感知外部环境的力变化,进而影响其运动控制和任务执行的精度。
而宇立通过设计多种六维力传感器工作原理方案,成熟的设计开发团队巧秒将传感器与连接件结合,能方便的安装到协作机器人,不需要适应板,不仅能够让机器人在承受超出常规范围的负载时保持正常工作,量程达200N/24Nm,过载能力达3kN/300Nm,实现约15倍的过载,减少因过载而导致的损坏和故障。
而且在需要精确控制力量输出的任务中,如搬运易碎物品或进行精细操作,过载能力强的传感器无疑能够更好确保机器人以适当的力度完成任务,有助于延长机器人的使用寿命,提高机器人的耐用性和可靠性,还使其能够在各种复杂和恶劣的工况中完成更多工作。
又例如当前人形机器人正在进入各类场景,可能会遇到各种突发的负载变化。过载能力弱的传感器在受到过大外力时容易发生损坏,导致人形机器人失控从而引发安全事故,但宇立仪器开发的这类过载能力强的传感器,抗弯能力强,轴间串扰小,刚度能做到谐波的4倍以上,确保了机器人在极端情况下仍能稳定工作,不受外界干扰,让机器人能够“举重若轻”,实现对于各类问题的解决。
综合而言,在人形机器人的足部加入高抗过载能力的六维力传感器,不仅可以实现抗过载测量机器人脚部受到的地面反作用力,还使控制系统能够相应地调整机器人的手臂和身体姿态以保持平衡,同时能协助机器人感知身体各部位的受力情况,以维持姿势的稳定,并监测足部与地面的接触力度,帮助机器人调整步伐,以适应不同的行走条件。
对于人形机器人和协作机器人腕部而言,通过加入具有抗过载能力的六维力传感器,则更是具备精确的力度控制和协调能力,极大增强手部的灵活性和精确度,能辅助机器人进行如抓握、搬运和装配等任务,增强机器人在需要柔顺控制场景中的适应性,使得机器人能够更加灵活地与环境互动。
结语与未来
宇立目前热销的高抗过载能力的六维力传感器,为机器人在领域应用打开了巨大增量应用空间。
因为机器人产品的能力大多时候并非一成不变,随着人工智能和机器学习技术的发展,人形机器人、医疗机器人、协作机器人产品正逐渐具备更高的智能化水平和操作能力。这就要求机器人的手臂能够精准地完成如抓取、组装和轻触等细致繁琐的力控制任务。
宇立仪器的六维力传感器具备多类型产品组合,已用于多个美国和日本的研究院和企业,能够做到更准确地测量人形机器人所承受的力和力矩,准确地感知和测量过载负载变化,并将这些信息反馈给控制系统,为机器人控制系统提供更丰富的数据支持,这使得机器人企业能够借此更精细地调整机器人的动作和力量输出,同时更好模拟人类的触觉感知能力,优化机器人的性能表现,最终帮助机器人能够提高其自主学习和决策能力,使机器人更加智能和灵活,更精细地控制自身的动作和力量,提高操作的准确性和效率。

不仅如此,AI大模型技术的不断发展,机器人正在逐渐具备自主学习能力,过载能力强的传感器还可以更好与智能算法相结合,帮助其不断优化自身的性能和行为模式,实现复杂的任务规划和决策,通过实时监测和分析机器人的负载状态,算法可以优化机器人的动作和路径规划,优化整体系统的智能化水平。
宇立开发的高抗过载能力六维力传感器,就能做到以上特性,而且由于结构轻薄,大多体积小且安装简单,能够轻易集成于关节内部,可以轻松助力人形机器人实现触觉感知及精准操作,力控灵敏度明显提高,在力控制、平衡稳定控制、安全防护控制三方面更具优势,以满足不同的控制需求,提升机器人的操作性能和稳定性。
当前,机器人正应用于更广泛、更复杂的场景,宇立过载能力强的传感器正带给开发者和企业研究者更丰富的冗余选择,有望在工业自动化、服务领域、人形机器人领域,让机器人能够展现出更高的效率和可靠性,并胜任更重型的生产任务,更安全地为人类服务,带来更加美好的人机共融新未来。
本文作者可以追加内容哦 !

