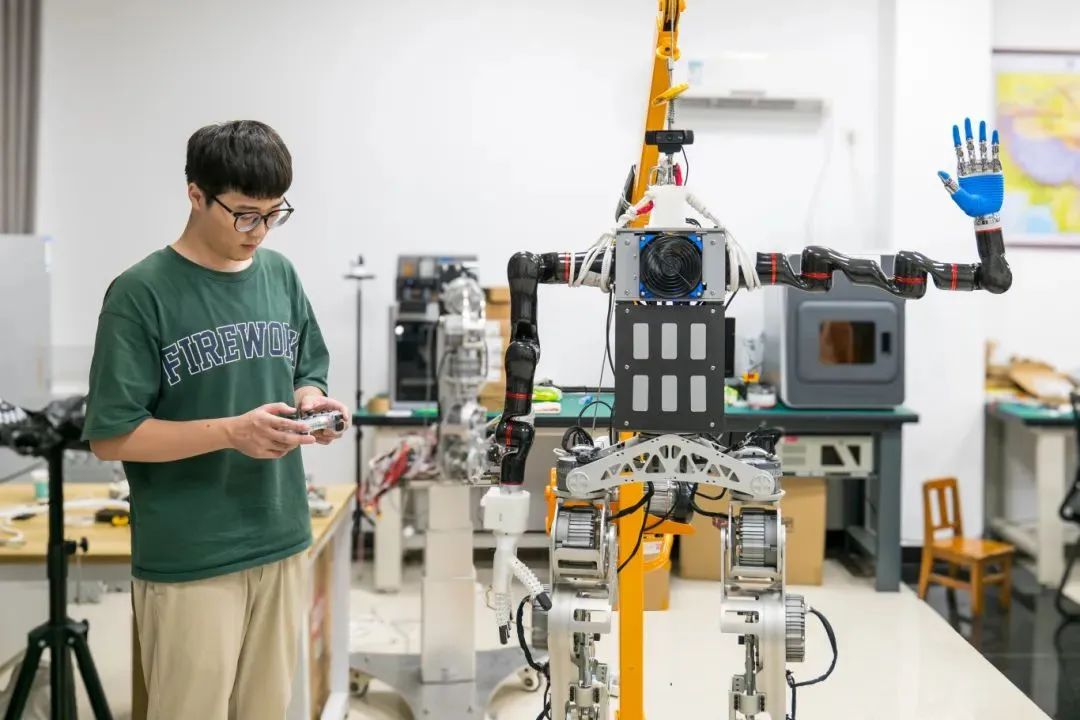
前不久,在中国科学院院士、武汉大学动力与机械学院院长、武汉大学工业科学研究院教授刘胜统筹领导下,武汉大学人形机器人研发团队取得里程碑式的成就——成功研制出该校首个人形机器人“天问”。

近日,湖北省委副书记兼省长王忠林,以及湖北省委常委、常务副省长邵新宇,亲临武汉大学计算机学院机器人系,对人形机器人“天问”的整体研发进展进行了深入细致的调研活动。调研期间,两位领导现场观看了“天问”机器人灵巧手精准抓取测试、行走测试,观摩了机器人应用于远程医疗操作的模型展示,并参与了机器人问答互动的精彩环节,对“天问”的多功能性与智能化水平给予了高度评价。
膝关节扭矩高达460N.m,可完成跳跃等高难度动作!
据悉,人形机器人“天问”名字灵感来源于中国古典文学瑰宝《楚辞》之中,具体源自屈原所作的不朽篇章《天问》。
该机器人身形挺拔,高1.7米,重65公斤,全身配备了多达36个自由度,具有极高的运动灵活性。尤为值得一提的是,天问机器人在某些核心性能指标上已跃居国内领先地位,例如其膝关节的扭矩高达460N.m,这一强大性能足以支撑机器人完成行走、奔跑乃至跳跃等高难度、高爆发性的动作。

除了具备传统机器人所共有的机械运动能力外,天问机器人还拥有一双格外引人注目的“灵巧手”。这双灵巧手共计7个自由度,占据了机器人全身自由度的近五分之一。更为独特的是,其柔性手指采用了腱绳驱动设计,既简洁又灵巧,使得机器人能够轻柔地抓取易碎物品,同时能够根据不同物体的尺寸、形状及材质,自动规划出最合适的抓取姿态与力度,实现手部关节的自适应调整,确保每一次抓取都既精确又温和。
以抓取饮料瓶为例,天问机器人能够利用其手部的视触觉传感器精确捕捉感知信息,并迅速计算出最佳抓取力度,随后通过精细调控连接手指指骨的腱绳,实现手部关节的灵活调整,从而能够稳稳握住瓶身,力度恰到好处,既不会滑落也不会造成任何损伤。

为了进一步提升天问机器人的运动自然度、协调性与灵活性,研究团队不断挑战自我,反复进行调试与优化,使其在仿真环境中持续学习与成长。除了着力打造力量与精准度并存的“灵巧手”外,团队还致力于研发具有高度灵活性与适应性的“柔性手”,以拓宽机器人的应用场景。
目前,天问机器人已完成运动形态调试的初步阶段,研究团队正全力以赴,致力于将其打造成为能够表达与感知情感、实现情感互动的“情智互融”型机器人,以期更好地融入日常生活服务场景,为机器人领域注入更多人文关怀与情感价值。
集中11学科资源支撑,6个月实现从立项到让机器人跑起来!
值得注意的是,人形机器人“天问”项目于本年度3月18日正式立项;仅仅时隔三月,即在6月份便顺利完成了样机的组装工作,并随即启动了全面的联调联试。而后又在用时不到三个月的时间里,熟练掌握行走、奔跑、跳跃等多项基本技能,展现出卓越运动性能。
天问机器人为何能如此迅速地取得开发进展?这与其背后强大的研发团队以及丰富的学科资源支持密不可分。

“天问”人形机器人开发团队汇聚了武汉大学三大学院的骨干学术力量:工业科学研究院与微电子学院的副教授李淼、城市设计学院的副教授邓俊,以及动力与机械学院的教授郭朝。依托武汉大学在工业科学研究院的综合计算机科学、动力与机械工程、城市设计、测绘遥感等11个优势学科资源,三位骨干联合相关专业领域的师生,共同攻克核心难题,积极探索创新的技术解决方案。
具体来说,研究团队整体聚焦“大脑、小脑、感知系统、躯干以及四肢”等关键部件的研发。其中,李淼副教授负责统筹整个机器人的技术运用,并专注于上肢(涵盖手、眼、脑)的操控技术研究;郭朝教授则主要负责下肢的运动控制,以及上下肢之间的联动与协调;邓俊副教授则致力于开发“天问”的感知系统,旨在提升人形机器人的交互能力,推动其向更高水平的智能化迈进。
经过团队数月的不懈努力与持续调试,他们从整体结构、电路设计、算法优化等多个层面出发,最终确定了下肢采用强化sim2real技术,上肢则运用模仿扩散模型的技术路线。这一创新性的技术方案,不仅为“天问”机器人实现了稳定行走的功能,更为其未来的进一步发展奠定了坚实的基础。
核心部件80%“鄂产鄂研”,促进湖北省人形生态圈建立!
人形机器人产业链的打造是一个系统工程,既需要核心技术的突破,也离不开上下游产业生态的协同支持。作为新质生产力的重要代表,人形机器人不仅融合了人工智能、高端制造、新材料等前沿科技,还因其技术密集度高、产业链复杂而备受瞩目。
目前,全国范围内,一场围绕人形机器人创新中心的布局正悄然展开:北京、上海、广东、浙江、四川等地纷纷成立相关创新中心,旨在推动人形机器人技术的研发与产业化进程。这一系列举措,无疑为人形机器人产业的蓬勃发展注入了强劲动力。
针对人形机器人这一新质生产力的打造,刘胜院士提出了深刻见解。他认为,构建一个真正意义上的“人形机器人”,其核心在于构筑一个健全且充满活力的产业生态系统。这一系统需全面覆盖从研发设计到生产制造,再到应用服务的全链条,通过优化生态环境,促进产业上下游的紧密协作与协同创新。
在刘胜院士的引领下,其团队自研发之初便将目光投向了更为广阔的人形机器人产业发展蓝图。他们跨越学科壁垒,贯通产业上下游,通过加强基础研究与多方合作,为提升我国人形机器人产业的国际竞争力奠定了坚实基础。
尤为值得一提的是,“天问”人形机器人在核心零部件的研发与应用上取得了显著成就。目前,该机器人所采用的传感器、灵巧手、仿生关节及芯片等关键部件,已有高达80%实现了“鄂产鄂研”。这一比例不仅彰显了湖北省在人形机器人领域的深厚技术积累与产业优势,更为湖北省乃至全国人形机器人产业链的完善与升级提供了有力支撑。
“鄂产鄂研”的高比例,意味着湖北省在人形机器人产业链的关键环节上掌握了自主权,这对于推动湖北省人形机器人产业的自主可控发展具有重要意义。同时,这也将促进湖北省内相关上下游企业的协同发展,形成更加紧密的产业生态,为人形机器人技术的持续创新与产业化应用提供良好生态环境支撑。
本文作者可以追加内容哦 !

