
手动运行机器人程序时,先将示教器右上角的模式旋钮调到T1。
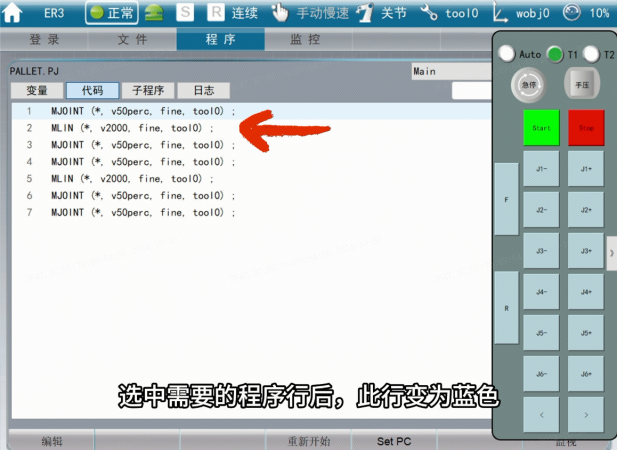
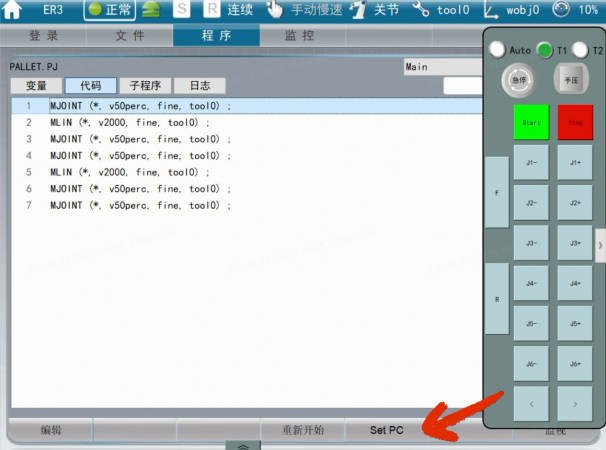
选中需要的程序行后,此行变为蓝色。点击示教器下方的Set PC按钮,从而设置指针,使程序从此行运行。
按下示教器右侧手压,当示教器上方任务栏S图标绿色时,此时机器人已经处于伺服上电状态。

这时按下示教器上的开始按钮,机器人即可运行程序。

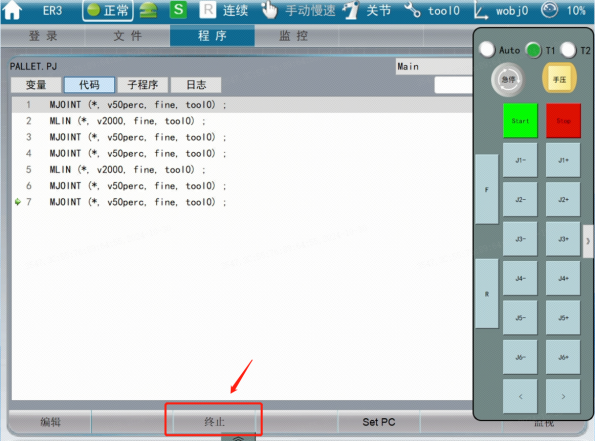
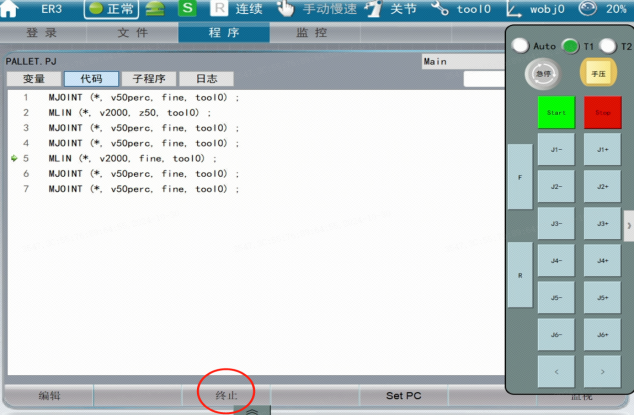
程序运行中可以使用停止按键,将程序暂停。程序停止后,屏幕下方会出现终止按钮,如果想终止程序运行,请点击“终止”按钮,指针会从绿色变成白色。

在3.5.0以前的版本中,终止按钮不会影响变量的状态。在3.5.0以后的版本中,程序变量会被置为初始值。
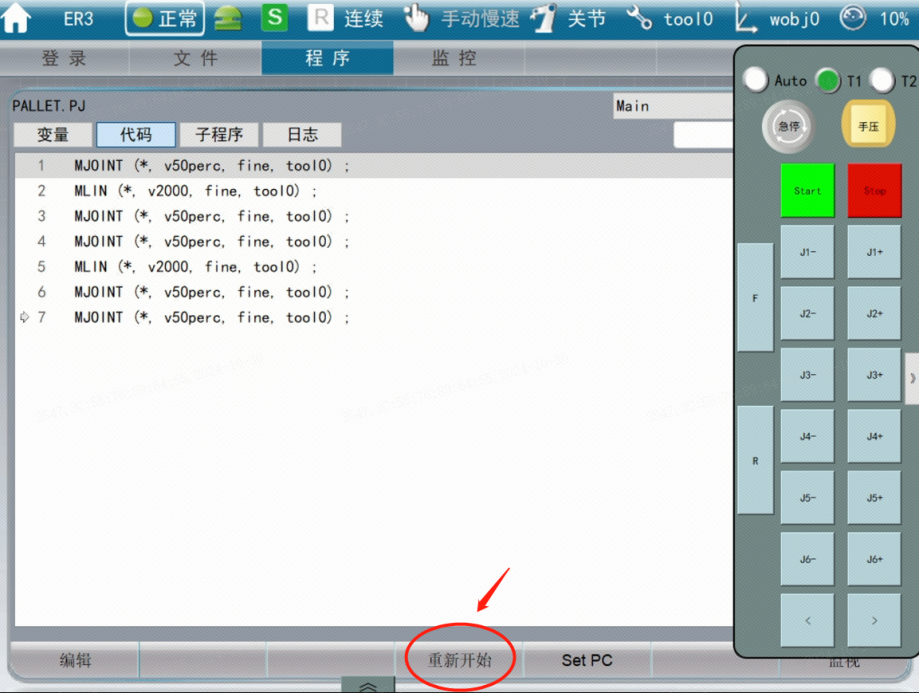
在程序终止后,示教器出现了一个“重新开始”按钮。使用该按钮会使指针跳转,至主程序的第一行。此时若有自定义的程序变量,它的值会被重置为初始值。
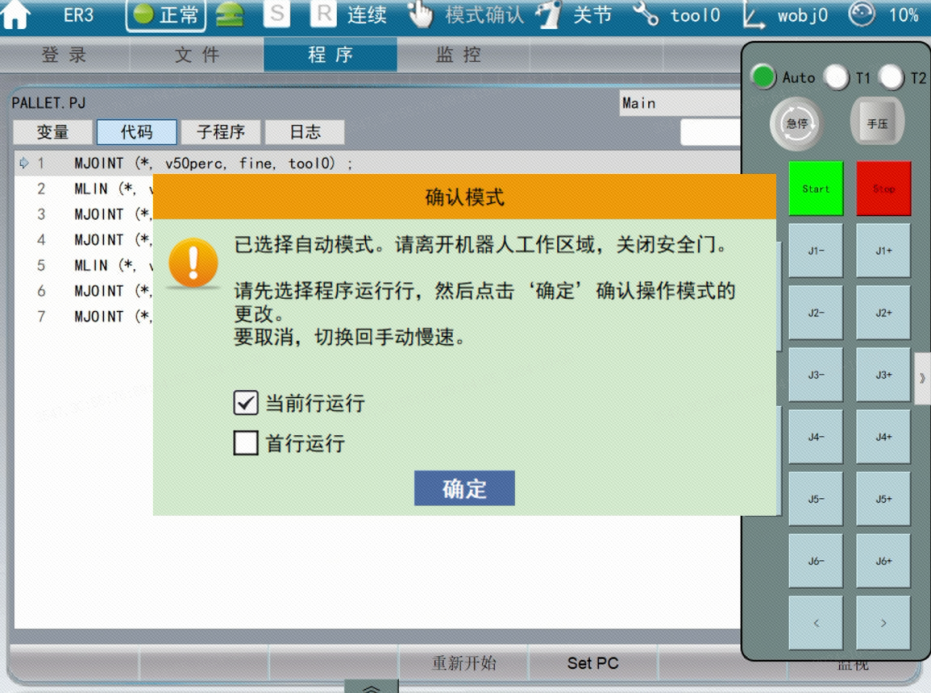
如果示教器的模式旋钮转为Auto模式,示教器上出现弹窗,用户可以选择选项:
1.“当前行运动”表示从当前光标位置运行程序;
2.“首行运行”表示从主程序的第一行运行程序。
在确认人员离开工作区域并关闭安全门后,以及机器人位置姿态能够正常运行的前提下,选择程序运行的位置后,点击确定按钮,弹窗即可消失。
自动模式下,不能用手压对机器人伺服上电,必须使用示教器右下角的power键,才能对机器人上电。

部分机器人伺服上电操作前,还需要做一步“确认伺服上电”操作。在电柜上,有一个绿色频闪的按钮,按下按钮,灯光变成常亮后即可使用power键。

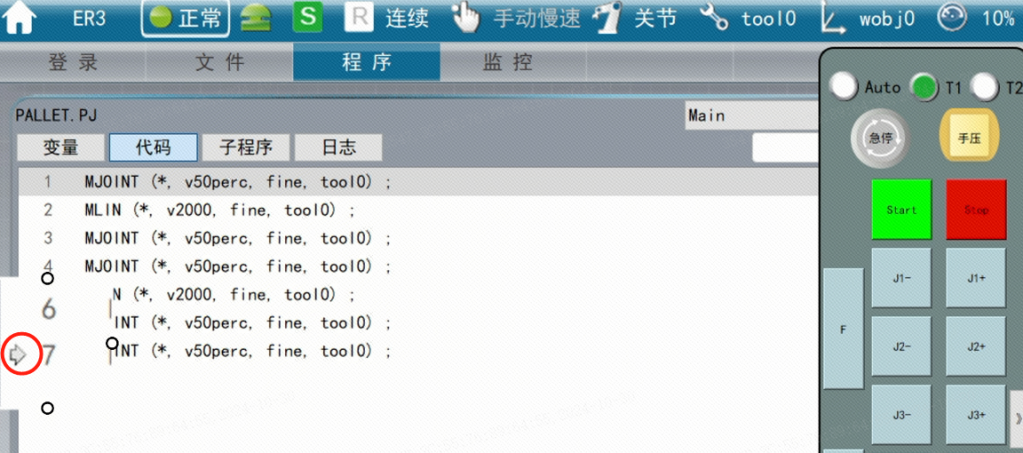
程序左侧不同颜色指针的含义:
白色箭头指向当前行号。

当机器人伺服上电后,运行程序时,指针的颜色会从白色变成红色。

运行中的程序被暂停后,指针的颜色变成了绿色。

程序停止后,点击下方任务栏中终止按钮,指针变回白色。
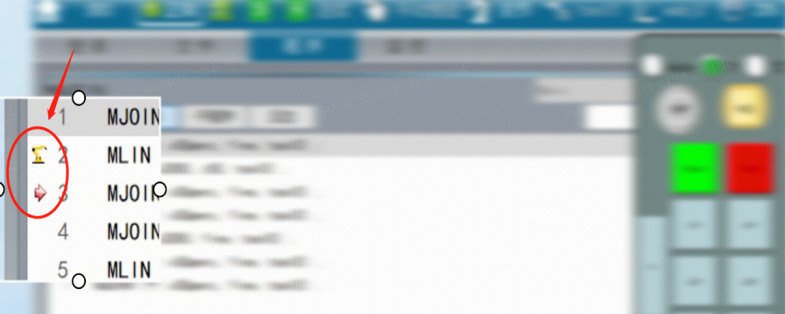
在运行运动程序时,屏幕上可能会出现两个指针图标。红色箭头为预读指针,机器人图标则指向实际运动的程序。
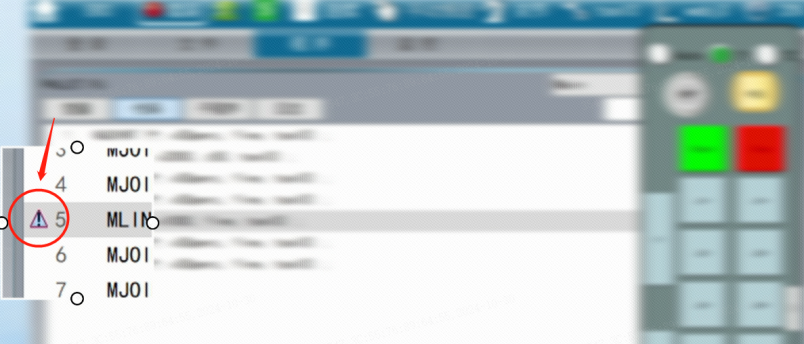
若运行程序时出现了错误,指针会变成感叹号的样式。
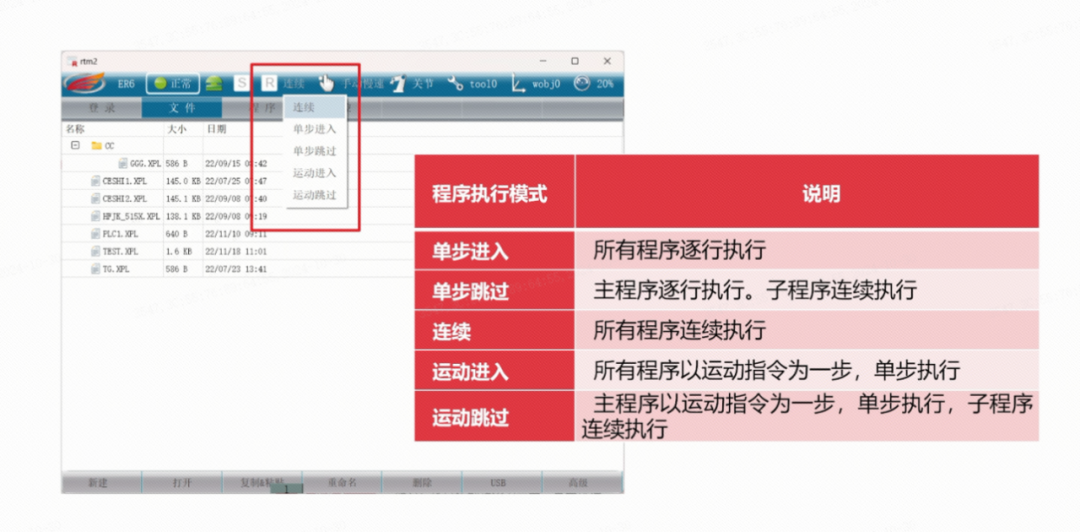
接下来介绍程序的执行模式。不同的执行模式可以通过示教器下方按键F3,或在状态栏中直接选择切换。程序的执行模式共有五种:单步进入,单步跳过,连续,运动进入,运动跳过。
机器人的程序指令分为运动指令,逻辑指令以及子程序。
我们用一套简易的程序举例。下图中,绿色框内是子程序。配合上在运行程序时需用到的 “START”按钮,现只由指令的类别,对实际的程序进行模拟。在子程序中,也可以添加运动和逻辑指令。不同的程序的执行模式,其运行的方式有很大区别。
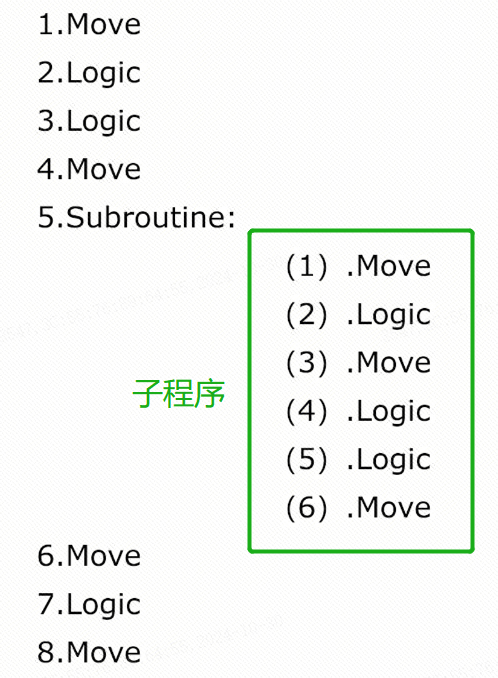
绿色方框中为子程序。
单步进入模式
单步进入模式下,所有程序逐行执行,每次按下“START”按钮,机器人执行一行程序。
执行顺序为:
1→2→3→4→5→(1)→(2)→(3)→(4)→(5)→(6)→6 →7 →8
单步跳过模式
在单步跳过模式下,当前程序依旧按照单步进入的方式运行。进入调用的子程序时,会连续执行。在第五次按下“START”子程序内连续执行主程序,子程序内执行每行程序无需再按“START”,出了子程序单步执行。
连续
选择连续运行时,机器人会按照顺序运行各类程序,只要按一次“START”,机器人会一行一行运行完所有程序,且在运行中自动进入、退出子程序。
运动进入
在运动进入模式中,程序以运动指令为一步单步执行。当机器人遇到运动指令时会单步执行,若是遇到了逻辑指令,则会连续执行,直到遇到下一个运动指令。举例程序中,1是move(运动指令),就需要按一次“START”,但2和3是logic(逻辑指令),程序会连续执行。当到了4又是运动指令,需要再按一次“START”。
运动跳过
运动跳过将当前程序和子程序分开。若为当前程序,则按照运动进入的方式执行。若为子程序,全部连续执行,不会在遇到运动指令的时候单步执行。

智造专家 埃夫特
关注我们分享更多信息!

