机器人大讲堂获悉,11月11日,千寻智能(Spirit AI)完成工商信息变更,再获天使+轮融资,投资方为柏睿资本(海南鸿钒)。

据了解,千寻智能由前珞石机器人CTO韩峰涛创办,于2024年2月成立。不到1年时间,千寻智能已接连完成三轮融资,其最近一次融资,金额高达近2亿元,就发生在距今相隔仅2月的8月份。

摘自高阳11月10日朋友圈,高阳与Sergey Levine近期在北美见面畅聊具身发展
无独有偶,在大洋彼岸,Physical Intelligence在11月5日宣布完成4亿美元(约合28亿人民币)融资,使其整体估值达到24亿美元(约合170亿元)。值得一提的是,Pi的目标是开发通用AI模型,打造一个能够控制任何机器人的通用大脑。这与千寻智能的理念何其相似。更为重要的是,Pi的联合创始人Sergey Levine与千寻智能联合创始人高阳同在加州伯克利进行研究工作,且二人为挚友关系。
两家公司先后被资本关注,充分证明了具身智能赛道的商业潜力。值得注意的是,千寻智能本轮投资方柏睿资本,聚焦人工智能与具身智能、智能化与信息化、新能源新材料领域的创新创业投资,而主要资金来源于宁德时代联创、副董事长李平的出资。

宁德时代联合创始人李平
千寻智能作为柏睿资本投资的首家具身智能企业,其千亿赛道背后的市场空间极具想象力。借助柏睿资本,千寻智能有望快速切入市场化落地进行具身智能泛化性作业验证,并率先成为国内首家实现具身智能商业化的公司。
面向具身智能企业除技术之外的最大挑战,即应用场景探索,今年9月初,千寻智能率先公布了通用机器人泛化技术最新研究成果。基于神经网络架构,机器人在非结构化环境下成功完成冲泡咖啡、手掂苹果等复杂动作,实现了多任务连续泛化能力,而业内能够做到多任务连续泛化能力的企业则屈指可数。11月,千寻智能再次更新视频demo,通过强大的AI能力完成流畅的插花、分拣糖果、抓握鸡蛋、倒水与叠放杯子等操作。
柏睿资本AGI领域首投,剑指何方?
柏睿资本为何会选择千寻智能这样一家具身智能企业作为其投资对象之一?笔者猜测,这与柏睿资本执行董事兼总经理李平的另一层身份有着密切关系。
李平作为宁德时代的联合创始人之一,同时也担任着宁德时代新能源科技股份有限公司副董事长的重要职位,是宁德时代的重要决策者。新能源产业升级是当前全球能源领域的重要趋势,而宁德时代被视为该领域的领军企业,正以其强大的技术实力和市场影响力引领着行业的发展方向。
目前宁德时代在全球范围内拥有数万名员工,虽前端电芯生产自动化程度已经高,但其现代电池生产的核心环节——动力电池模组PACK线,其自动化程度仍然较低,大部分工作都需要由人工完成,这也是直接影响其生产效率的主要因素之一。
近几年,宁德时代一直在探索智能化工厂模式,2022年宁德时代研发费用为155.1亿元,而2023年宁德时代研发总费用更是达到了183.56亿元,同比增长18.35%。目前,宁德时代智能工厂已实现“生产数据可视化”“生产过程透明化”和“生产现场无人化”。中控系统向所有子设备传送工作指令,机械臂、AGV自动运输车、智能机器人等设备协同工作,用以提高生产效率。

宁德时代数字化智慧工厂
对宁德时代来说,智能化转型不仅要关注电池生产与拆解环节的自动化和安全性,还致力于在更广泛的工业领域推广智能化解决方案。目前国内具备连续泛化作业能力的具身智能企业屈指可数,千寻智能作为少数具备AI+机器人生产力级全栈技术能力的具身智能公司,具备强大的技术能力与商业化潜力,且在整体战略方向上,两家企业趋同。这背后充满着让人想象的空间。
宁德时代联创首投具身智能,为何选中千寻智能?
目前具身智能领域正处于产业爆发期,市场处于不完全竞争状态,国内具身智能赛道企业已超百家,但为何柏睿资本偏偏选中千寻智能?
纵使百家具身智能企业,但细化到AI、硬件和商业化三个方面,能够凭借硬实力筛出来的企业就不多了。
具身智能机器人要实现大规模落地,首先要解决泛化能力,满足不同场景的作业要求,而解决泛化能力的前提是如何获取高质量数据样本,这直接影响到机器人执行任务的精准性。目前业界普遍聚焦于Sim-to-Real,实现从虚拟到现实的迁移,但仿真数据是否能够支撑起机器人在现实复杂多变的作业环境,依旧是一个需要持续关注的技术方向。
千寻智能拥有业界领先的具身大模型技术及卓越的机器人研发能力,在预训练模型、模仿学习和强化学习等方面核心技术优势突出。千寻智能联合创始人高阳,本科毕业于清华大学计算机系,期间曾加入朱军团队参与研究贝叶斯推理,以及在谷歌北京跟着原谷歌中国工程院副院长张智威和清华学长李方涛研究 NLP。
千寻智能联合创始人高阳
高阳因热爱机器学习而选择美国加州大学伯克利深造,攻读博士,但由于Michael Jordan过于偏重理论,面对理论与预期的差距,高阳主动调整方向,加入Trevor Darrell团队,专注于机器人跨模态交互研究。在Trevor的鼓励下,高阳不仅深耕视觉领域,还勇于探索可动AI与决策科学,博二即涉足自动驾驶,并在Waymo实习深化实践。他敏锐洞察到自动驾驶与机器人控制的共通性,积极推动模仿学习与强化学习的结合。在Trevor领衔的Deep Drive项目中,高阳负责核心算法开发与实车验证,亲历了从仿真到现实的跨越。其发布的自动驾驶数据集BDDV,强调了数据质量对模型的关键作用。
博士后期间,高阳在加州伯克利与机器人学习领域的顶尖学者Sergey Levine和强化学习大牛Pieter Abbeel等人深度合作,值得一提的Pieter Abbeel是扩散模型(Sora、SD背后核心技术)的提出者之一,而Sergey Levine则是美国Physical Intelligence(Pi)的联合创始人,专注于自主智能体学习复杂行为的算法研究,为Physical Intelligence提供了关键的技术支持和战略指导。
尤为重要的是,Sergey Levine与高阳的技术研究都关注于提高机器人学习的泛化能力,通过训练单一的策略或模型来控制多种机器人,同时两个人都重视数据在机器人学习中的重要性,探索了如何利用多样化的数据集来训练机器人模型。由于两者研究技术路线趋同,因此两人也成了亲密无间的挚友,通过与Sergey Levine的交流,高阳更加坚定了自己的技术路线。而Physical Intelligence的再次亮眼融资,也让高阳看到了千寻智能未来成为一个全球顶尖具身智能公司可能性。
可能很多人会忽略一点,全球最厉害的具身智能科学家绝大部分都在北美,而加州伯克利又被称为具身智能大本营。高阳的同门师兄很多都选择留在美国,只有高阳在伯克利完成博士学业后,决定回国发展。在决定回国之前,高阳收到了多家知名自动驾驶公司的offer,包括Waymo、Nuro、Aurora等,但他最终选择了回国任教,而不是加入这些公司。回到国内后,他在清华叉院(清华大学交叉信息研究院)任博士生导师,聚焦计算机视觉与机器人结合领域的研究。因为他坚信当具备泛化能力的机器人技术得到大规模普及落地的时候,中国将会率先进入第四轮工业革命,而他则立志成为那把开启这扇大门的关键钥匙。
高阳在机器人领域拥有多项技术创新成果,在刚刚过去的德国CoRL 2024顶会上,高阳研究组连中四篇高水平论文,其中《Data Scaling Laws in lmitationLearning for Robotic Manipulation》更是获得CoRL X-Embodiment workshop最佳论文奖!高阳研究组研究人员成功发现具身智能领域的“圣杯”--data scaling laws,让机器人实现了真正的零样本泛化,可以无需任何微调就能泛化到全新的场景和物体。

高阳研究组获得CoRL X-Embodiment workshop最佳论文奖
论文分享一:高阳研究组提出了一种创新的“基于大模型先验知识的强化学习”框架(Reinforcement Learning with Foundation Priors, RLFP)。该框架通过利用策略、价值和成功奖励等基础模型的先验知识,为强化学习过程提供指导和反馈,提升了机器人在探索新环境时的效率,并减少了对手动设计奖励函数的依赖。RLFP框架中的基础模型引导的Actor-Critic(FAC)算法,能够在仿真和真实环境中高效完成复杂的操作任务,拥有强大的自主学习和探索能力。
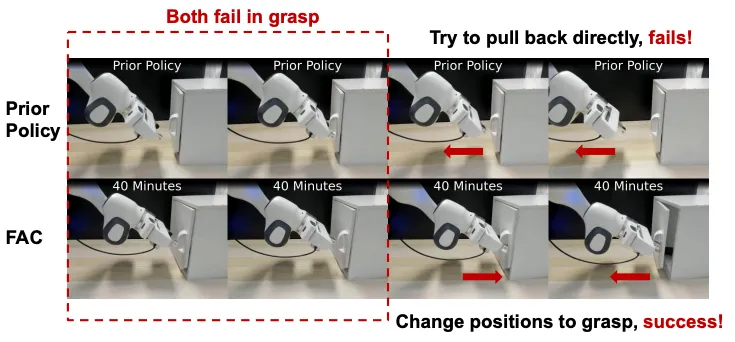
大模型先验策略知识的失败案例和FAC的成功案例
论文分享二:针对灵巧手动态抛接物体的挑战,高阳提出了DexCatch框架。该框架能够在多种日常物体和不同的投掷-接物场景中实现高效稳定的操作,成功率达到73%,且在未见过的物体上展示了强大的零样本迁移性能。DexCatch通过引入混合优势估计方法和物体点云的压缩特征,解决了高动态接触和物体属性差异带来的挑战,为灵巧手的动态操作提供了新的解决方案。
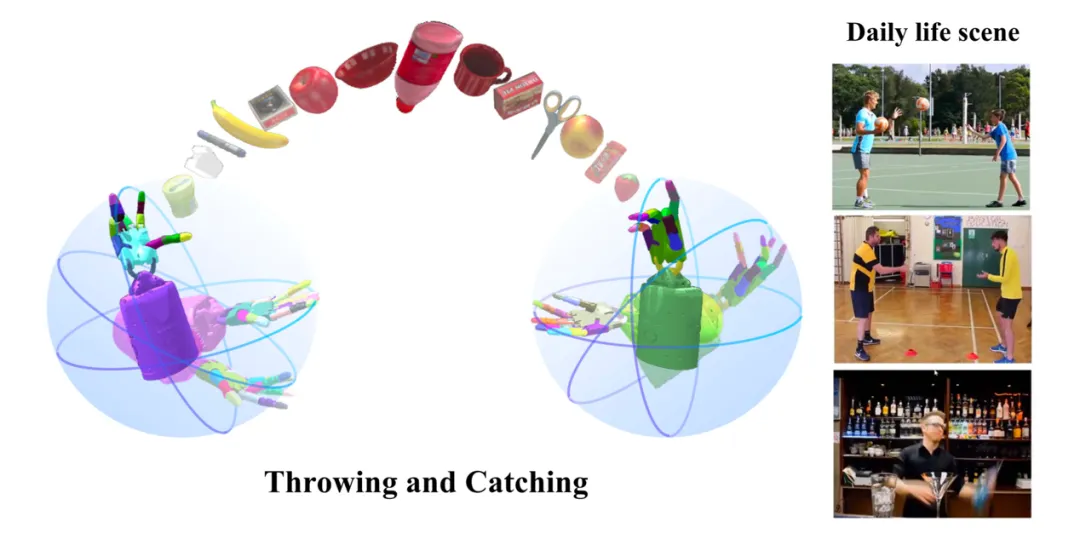
使用影子手进行投掷和接住物体的泛化任务
论文分享三:为了提高机器人学习的可扩展性,高阳研究组提出了使用“通用流”(General Flow)作为机器人学习的基础可供性表征。通用流通过描述空间中被操作物体上若干3D点的未来走向,将操作者本体与操作技能解耦,实现了从人类视频到机器人技能的高效转移。该方法在不使用任何机器人数据的情况下,于多个场景和任务中取得了高成功率,为更大规模地从人类视频中学习机器人操作技能提供了新方法。
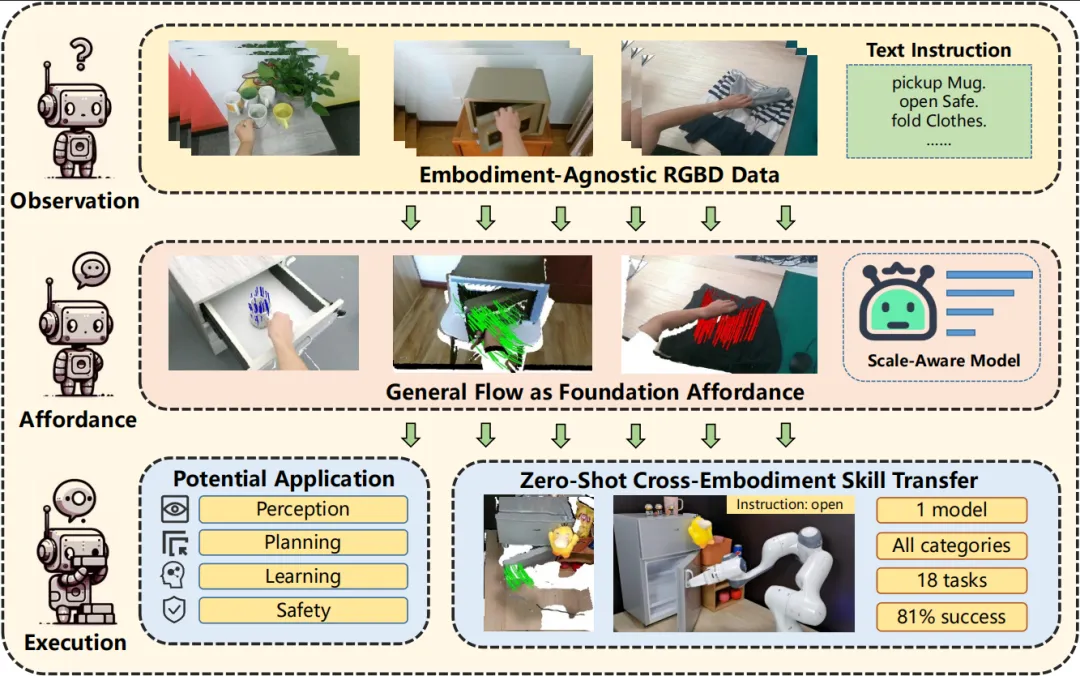
通用流(General Flow)作为一种基础可供性表征(Affordance)
论文分享四:针对机器人操作任务中样本效率低的问题,高阳研究组提出了SGRv2框架(Semantic-Geometric Representation V2)。该框架通过引入动作局部性的归纳偏置,改进了视觉和动作表征,显著提升了样本效率。SGRv2在仅使用少量演示数据的情况下,便能在多个仿真基准测试中取得卓越效果,并在真实环境实验中展示了完成复杂长时间任务的能力。
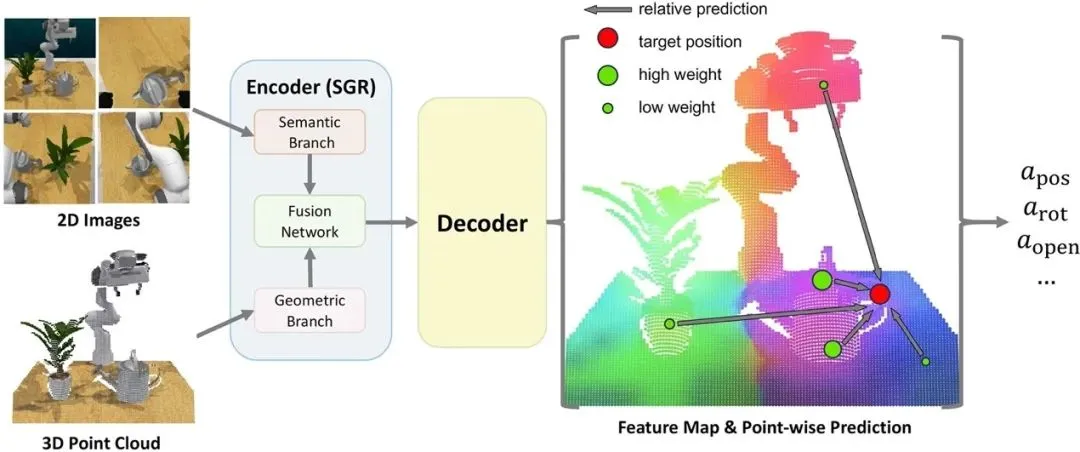
SGRv2网络结构图
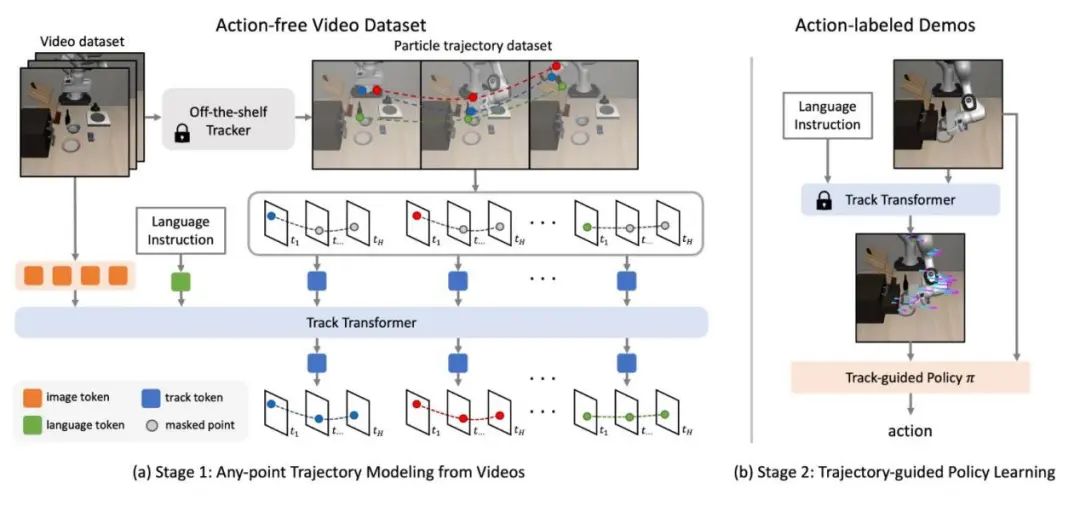
此外,今年7月在荷兰举办的机器人顶会RSS 2024,高阳提出任意点轨迹模型ATM框架,并获得全数审稿人满分评价。该框架在多个基准测试任务上表现优异,显著优于现有的视频预训练方法,为小样本和跨具身机器人学习领域提供了新的理论支撑。
在强化学习方面,高阳提出EfficientZero算法,该算法在Atari基准测试上达到了人类性能的109%,其样本效率首次超越了人类的水平,达到了经典强化学习算法DQN数据效率的近600倍。EfficientZero解决了强化学习领域的重大基础科学问题,填补了国际高效率强化学习领域的空白,这也是迄今为止,样本效率最高的强化学习算法。该算法被前OpenAI联创、强化学习带头人John Schulman,予以高度评价。
在模仿学习方面,高阳提出EfficientImitate高性能模仿学习算法,相比斯坦福的VMAIL算法,EfficientImitate的性能提升了600%。在相同数据量的情况下,EfficientImitate能够让模仿学习的泛化性达到最高水平。此外,高阳还提出,ADS算法,能够从无动作演示视频中汲取知识,提升机器人适应新环境的能力。同时,ADS还融合多模态感知信息,增强机器人在复杂场景中的感知准确性。
在机器人视觉方面,高阳提出Seer视频预测算法,Seer算法基于人类反馈的风险敏感强化学习,能够高效预测未来图像,帮助机器人完成自主导航与任务规划。
市场调研和战略咨询公司沙利文数据显示,2024年中国具身智能行业规模有望突破千亿元。因此谁能率先进行技术落地尤为重要。值得一提的是,千寻智能联合创始人郑灵茵,作为工业机器人赛道出海的先行者,曾0-1组建、带领团队深耕全球市场,探索全球应用场景,取得丰硕成果。也许正因为公司在硬件,AI以及商业化过硬的三角能力,柏睿资本认为千寻智能具备快速完成早期的商业化落地的潜力,最终促成本轮融资。
据相关资料显示,千寻智能核心团队成员来自 UC Berkeley、CMU、清华大学、北京大学.浙江大学中国科学院等国内外顶尖高校与阿里小米等大型企业,具有丰富的行业经验和创新能力。仅过去短短10个月,就完成了从机器人本体,核心算法构建以及多任务连续泛化能力的展示,真正意义上诠释了AI+机器人全栈生产力级的技术能力。
结语与未来:
回顾2024年,多家人形机器人与具身智能企业开始将机器人接入大规模多模态模型,实现无缝语音交互能力,并能理解人类意图,产生逻辑推理能力。这是具身智能技术迭代的又一次重大升级。
有句老话讲,能否完成是一回事,完成得是否出色则是另一回事。就在刚刚过去的9月,千寻智能便通过端到端神经网络成功展示了机器人非结构化环境作业能力,该机器人甚至精准识别透明反光物体,拥有极为优秀的多任务连续泛化能力,并且迭代速度极快,此举在业内可谓无出其右。
截至笔者发稿前,Open AI对外公布了新一轮融资,融资金额高达66亿美元(约合472亿元),融资后估值已达到1570亿美元(约合1.1242万亿元),这一数字使其成为仅次于字节跳动和SpaceX的未上市独角兽公司之一。而技术理念趋同的Physical Intelligence其估值也达到了170亿元。对于千寻智能这家AI+机器人生产力级全栈技术能力的具身智能企业,可谓是前途无量。
本文作者可以追加内容哦 !

