拓斯达新一代X5机器人控制平台如何突破具身智能的“小脑”瓶颈?

人人都在谈具身智能,那什么是具身智能?
1950年,科学家图灵在其论文《计算机器与智能》中提出了著名的图灵测试,用以评估机器是否能够展现出与人类相似的智能行为。这一理念,可以视为具身智能最早的起源之一。
具身智能是依靠物理实体通过与环境交互来实现智能增长的智能系统。“具身”是前提,即具有身体且能通过交互、感知、行动等能力来执行任务;“智能”是核心,将人工智能技术嵌入物理实体如机器人身上,可显著提升对环境的感知、交互和任务执行能力。
具身智能的实现路径:
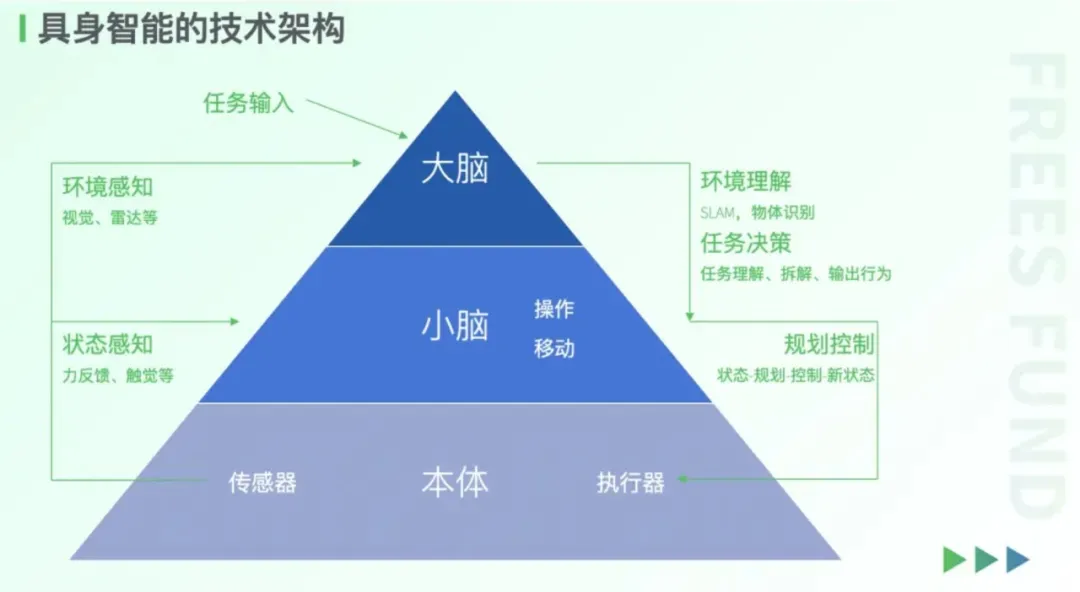 图片来源:峰瑞资本
图片来源:峰瑞资本具身智能包含【大脑】、【小脑】和【身体】。
【大脑】负责理解任务、感知外部环境、结合感知信息对任务进行分解,并做出执行策略。
感知:具身智能可以感知并理解周围环境,在物理环境中执行具体任务。感知是具身智能交互世界的窗口,通过环境传感器(如视觉、听觉、触觉、温度、湿度传感器等)、运动传感器(如力传感器、IMU 等)收集环境与自身状态信息,作为决策环节的依据。
决策:根据感知的信息以及任务目标,对自身行为进行决策,并向控制模块发出指令。该环节以中央计算单元与多模态决策算法为核心。
【小脑】负责运动控制、感知外界状态,在大脑的策略下实现机器人动作的执行和反馈。
控制:将决策指令转化为实际操作,实现与物理世界的互动。为确保指令在微操作或高速运动场景中的准确执行,该环节需要具备高精度控制能力,同时与感知模块紧密协作,在闭环控制下实现实时调整。
【身体】负责行动,包含机器人的物理结构和执行器,它根据小脑层的运动规划,实际操作机器人的各个关节和组件,完成既定的任务。
得益于多模态大模型技术的进展,【大脑】领域的技术已经发展得非常成熟,不太存在数据匮乏的问题;而【小脑】,则是目前具身智能的主要技术瓶颈。
新一代X5机器人控制平台发挥【小脑】的纽带作用
拓斯达通过运动控制作为切口布局具身智能,推出“感-算-控”一体化的新一代X5机器人控制平台并实现工业场景的应用。该平台将作为运动控制物理引擎接入AI仿真系统,发挥着类似人体“小脑及嵴椎”的纽带作用,加速具身智能技术在工业场景中的应用。
在技术架构层面,新一代X5机器人控制平台采用灵活的云边端架构,根据不同的算力需求,将具身智能大模型划分为云侧、边侧和端侧三种部署方式,实现具身智能大模型在多样化应用场景的精准适配。
云侧部署优化对大规模数据处理和复杂计算任务的能力,适合于需要集中处理和存储大量数据的场景,例如AIGC大模型与语言大模型的应用。边侧部署则强化了对实时性和低延迟的要求,适用于对响应速度敏感的工业自动化和物联网应用,例如更加泛化的图像识别功能。而端侧部署则专注于提供高效的本地处理能力,尤其适合于对实时性和安全性有较高要求的场合,为机器人更加高精度的运动控制和感知提供实时性保障,例如实时环境感知能力与智能避障功能。
接口层面,支持Python、C++、C#等IT领域常用的开发语言框架,已开放超过400个功能接口,并提供自由协议、SDK等多种通讯协议,打通具身智能大模型与机器人之间的数据隔阂,实现大模型与控制器之间的顺畅数据交互。
新一代X5机器人控制平台作为拓斯达的自主研发成果,涵盖从底层硬件到上层控制软件及核心算法的全方位技术链条。
软件层面:可依据具身智能大模型的训练所需数据类型要求,提供优质数据以支持模型训练,优化具身智能大模型的质量。
硬件层面:结合国产操作系统,不同的具身智能应用场景可以灵活地选择搭配算力芯片和硬件方案,实现高效且多样化的部署策略。
具身智能有望成为新型工业化的关键核心
“自动化工厂”早已屡见不鲜,但是能根据实时数据和环境变化做出智能决策和优化调整的“智能化工厂”仍在发展中。
工业场景下,具身智能技术在规范性和成熟度上具备更加显著的优势。具身智能在工业领域的应用使得工业机器人等完成从“能干活”到“会干活”的转变,能够极大提升工业生产的效率,以此来为工业制造的智能化升级提供强大支持,将使得工业制造过程更加灵活、高效、智能。
展望未来,拓斯达将继续依托底层控制技术,以机器人智能控制平台作为智能中枢,发挥其纽带作用,推进具身智能技术在实际场景中的应用,促进人工智能与工业场景的深度融合。
本文作者可以追加内容哦 !

