
继「全国都能开」后,「车位到车位」成为智驾最新的评价标准。
具体分两个维度,「有没有」以及「强不强」,就此区隔强者与恒强者的身份。
放眼全球范围内,特斯拉、华为、理想、小鹏、小米、极氪六名智驾玩家,都进入了「车位到车位」的竞争场域。
一场更严苛的像素级竞争开启后,新旧势力们追赶第一梯队的弦崩得更紧了。
优胜劣汰下,有人离终点更近一步,就意味着有人离淘汰也更近一步。
01、当智驾谈论「车位到车位」时,到底在谈论什么
端到端落地后,比拼关键在于用户体验。
从营销视角着眼,用户体验是一个很笼统的词,车企/供应商需要借助一个强有力的论据,让用户看到击穿痛点的价值。
由此,各玩家盯上了「车位到车位」。
华为率先提出了这个概念,按照字面含义,它指向了从任意车位出发到目的地车位的全程智驾。
如果说此前「全国都能开」是从面上证明开城规模广,现在的「车位到车位」就是从点上明确使用价值强,把「从 A 点开到 B 点」的底层逻辑映射到现实层面。
在华为打出样本之后,小鹏、理想、极氪、小米都心照不宣地将「车位到车位」提上日程。
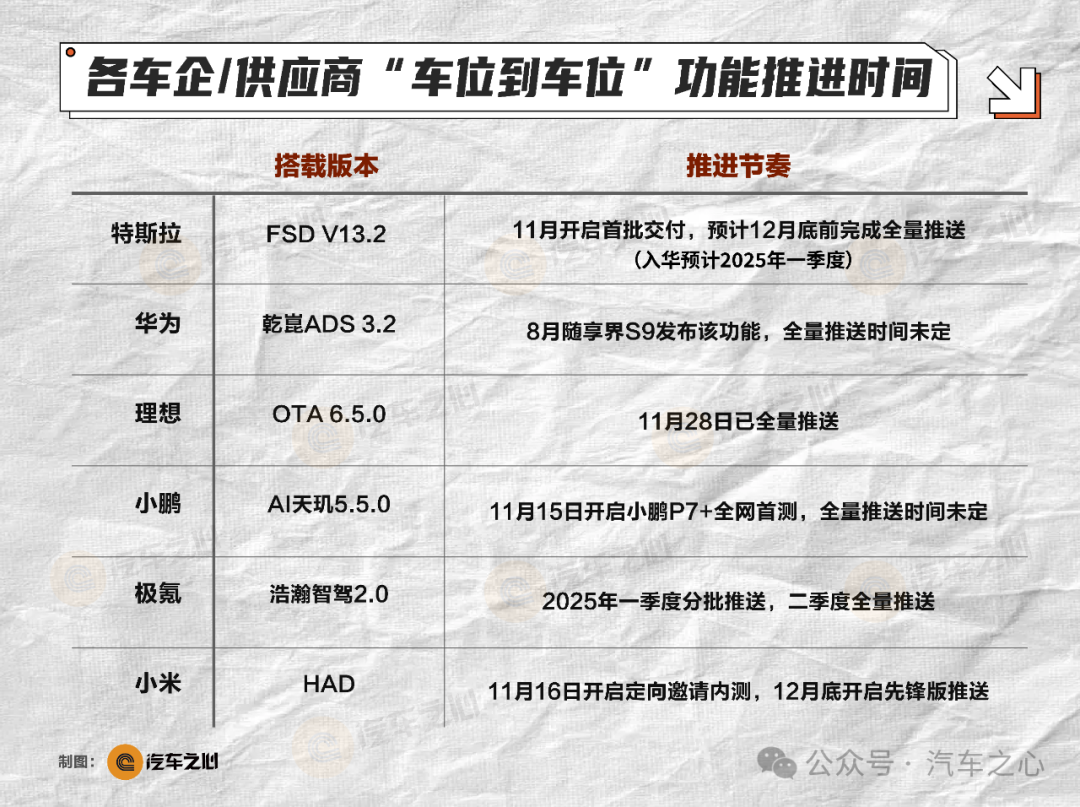
大洋彼岸的特斯拉,最近也将「车位到车位」功能更新到智驾最新版本 FSD V13.2 中。
我们试图从六名玩家对于这一功能的叙事中,解读其背后的隐含意义,主要有三点。
一是全场景覆盖。
「车位到车位」打通了停车场到公开道路、公开道路到园区、园区地面到地下车库等多种场景,其中,「过闸机」能力成为了表述关键词。

理想强调在端到端大模型应用下,系统可以自主通行 ETC,且不限范围、无需学习,全国超 1 万个收费站均可识别通行。
极氪则表示该功能具备行业首个「四抬杠」能力,能够毫秒级精准捕捉抬杠状态,自动识别并通过地库闸机、高速 ETC 闸机、园区闸机等。
二是应对复杂路况。
此前车企在阐述智驾能力时,往往把应对多个极端场景作为重点论据。但极端场景多样化无法穷尽。
而在「车位到车位」的语境下,则强调了智驾应对复杂路况的连贯性与完整性。
小鹏就强调了车辆在「车位到车位」整个过程中,能够应对复杂路口、汇流变道、识别并避让特种车辆,实现 U 型掉头等特殊操作,做到全程无接管。
三是连接泊车功能。
车企在自动泊车能力上已经卷到了厘米、分秒级别。
这边小鹏表示,系统可以泊入比车身宽仅 30cm 的极窄车位,号称侧方位、断头位、刁钻车位「一把到位」;
那边极氪跟上,声称其泊车功能支持车宽+左右 20cm 的窄车位泊入,平均泊车时长 36 秒,在压线情况下能实现智能偏移。
现在,在「车位到车位」的应用场景中,这种出色的泊车能力与车辆行驶之间没有断点。用户坐进车内,就可以启动智驾,系统可以在自动驾驶与泊车无缝协作下,到达下一个车位。

由此,跨过「车位到车位」这道大坎的玩家们,正在新的度量衡中开启竞速。
目前,理想已经在 11 月底全量推送了「车位到车位」功能,华为、小米、小鹏、特斯拉都开启了不同程度的内测,都预计明年开启全量推送,极氪则预计明年一季度分批推送,二季度全量推送。
02、「车位到车位」水面之下,暗流交相涌动
当各家都亮出「车位到车位」大招时,如何评判功能优劣的问题接踵而至。
理想汽车技术专家文治宇曾一针见血指出,车位到车位做的好不好,主要看两个核心要素。
一是体验连贯性,即在启动这个功能前是否需要多次学习,学习完成后能否立即开启使用;
二是产品完整性,即对于一些复杂起步场景,如多层车库能,是否也能够驾驭,做到全程无断点。
围绕这两点,把目前这些玩家的「车位到车位」功能放进审视场域中,可以明显看到共性与差异。
共性在于,无论内测还是全量推送,目前国内玩家在地库、封闭停车场场景时由于没有导航信息,需要先由用户跑「图」。
具体建图方式还不一致,有玩家要求车企把地库所有路线全部跑一遍,相当于给地库建一次全面、清晰的地图后,方可使用「车位到车位」;
另一种思路是,用户仅需按照系统要求,完成起点、目的地的车位驶入进口、驶出出口的路线学习,即可启动该功能。
当然,系统也会结合用户常驾驶路线数据,通过静默学习,自动生成通勤路线的「车位到车位」。
所以,唯一区分点在于,「车位到车位」功能能否适用于初次行驶场景,即用户在陌生路段不建图,也能全程使用智驾。
目前似乎只有特斯拉做到了。
在国外用户实测 FSD V13.2 版本的视频中,用户把车辆开进多楼层、甚至标识不清晰的停车场顶楼后,还故意绕了很多圈迷惑 FSD,但开启智驾后,系统在未提前学习路线的情况下,没有出现无目的绕圈、跟车行为,而是很快找到正确路线,并从出口处驶离停车场。
如果说国内玩家「车位到车位」功能需要学习路线后才能开启,就意味着它目前适用于固定、高频率的出行路线,而特斯拉把这一先验条件摘除后,用户则可以通过从车位开启智驾,去往任何「无图」区域。
另一差异点在于,玩家们的对于「车位到车位」的具体解题思路还不一致:
一派以理想为代表,遵循「VPA+NOA+VPA」的技术路径。
即在停车场路段,驱动系统行驶的是记忆泊车/代客泊车模式,而驶入公开道路后,则立刻转变为智驾领航模式。从 SR 画面可以直观看出,当系统进入停车场景时,从泊车界面会丝滑切入智驾界面。
这一路径,也成为了目前多数玩家的选择。
另一派以特斯拉、小鹏为代表,用一套模式打通全场景。

即无论是在园区封闭路段、地下停车场区域还是在公开路段,SR 界面一直保持智驾 NOA 画面,不会随场景变化切换软件系统。
小鹏自动驾驶产品高级总监袁婷婷表示,这种方式的优点在于,当行驶到停车场与公开道路的交汇点时,系统不会因切换软件导致卡壳现象,相当于从汽车起步时,就切换到 NGP 系统上,保证体验一致性。
行泊一体的逻辑,还使得 XNGP 大模型在封闭场景及停车场区域,可以更好应对绕柱、避障、极窄通道会车、连续急弯等场景。并且,相比两套模型,一套模型的更新、维护在成本、效率上似乎是更优解。
总之,尽管目前特斯拉 FSD V13.2 内测版本看似领先一步,但距离其入华还有一段时间。
在此期间,国内玩家的技术飞轮正疯狂转动,不断优化「车位到车位」功能,更新到最终全量推送的版本上。
在真正同台竞技的时刻之前,胜负依然未定。
03、端到端进化到 2.0 时代
「车位到车位」,可以看作各玩家对于「端到端」方法论的具体演绎。
「端到端」上车,本就指向了 AI 系统拥有类人驾驶的能力,一张神经大网囊括了从感知到规控所有模块,从而在应对极端场景时,不再被生硬的规则控制,而是像人类司机一样观察、思考、决策、执行。
这反映到「车位到车位」的实际场景中,系统可以应对各类极端情况,驾驶水平愈发出色,由此构成了技术-应用的完整闭环。
在数据闭环迭代过程中,「端到端」技术也演化到了 2.0 阶段。
这时,投身于端到端浪潮的头部玩家们,从路径收敛走到了路径分野的十字路口。
一边从感知规控模块划分,「两段式端到端」向「一段式端到端」奔涌。
前者将感知模块视为一段,预测到决策模块视为另一段;后者则是将感知与规控端到端模块全部打通。
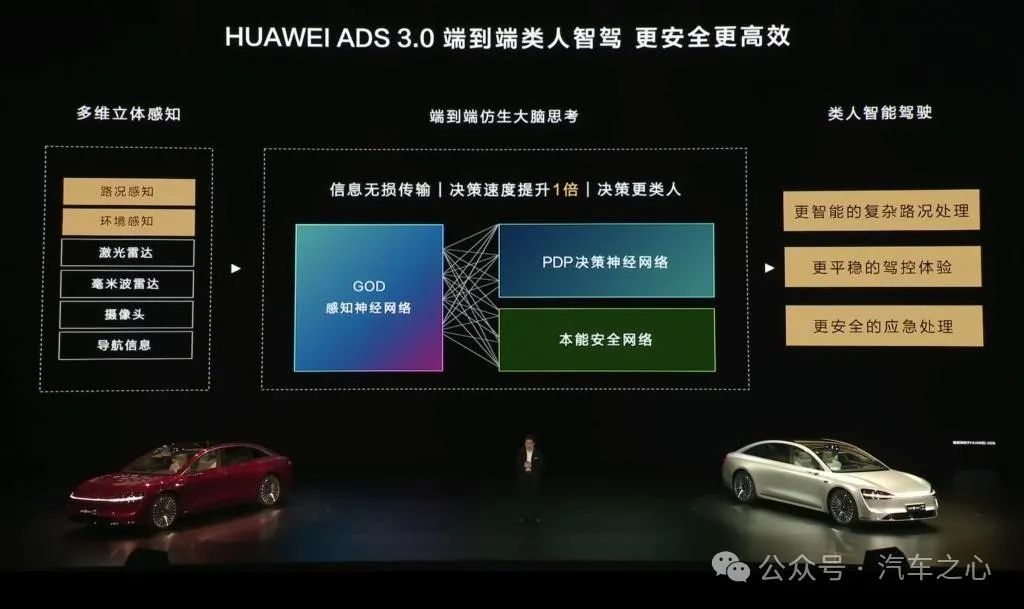
「两段式端到端」典型代表为华为乾崑 ADS3.0,由 GOD+PDP 网络组成,GOD 网络负责感知、识别障碍物,PDP 网络则根据感知信息迅速做出决策。
而「一段式端到端」主要玩家有 Momenta、商汤科技等,将感知端到端与规控端到端都集成到一个大模型中,使系统能够更直接、高效地处理信息并作出反应。
一段式端到端是两段式端到端的进化形态,由于其打通感知、规控端到端环节,使得模型感知信息更准确,规控反应可以更为顺畅,灵活,智驾水平更强。
Momenta 已经践行了这一演进路径,在 2023 年量产两段式端到端后,在今年上半年又实现了一段式端到端落地。
据媒体报道,华为车 BU 也在攻入一段式端到端方案,这或将成为 ADS 4.0 版本的重要能力。
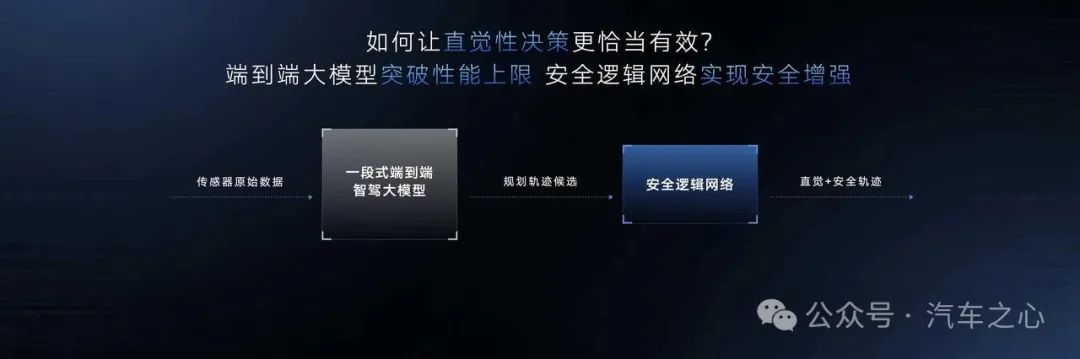
另一边从技术路线思考,「端到端+VLM」朝「VLA」路径开始迭代。
理想以「快慢系统」理论为基础,先设计出一套「端到端+VLM(视觉语言大模型)」系统。
两个模型分工协作,端到端模型基于快思考,负责处理常规的驾驶行为,VLM 模型通过慢思考,应对高难度的极端场景。
而 VLA 模型是近期走上技术神坛的关键词,由元戎启行率先提出。
VLA 即视觉-语言-动作模型,显然,从名称中可以发现,它是「端到端+VLM」系统的一整个融合体。

这种一体化方式,使系统接受到数据后,不再由「快慢」系统进行多次交互与调整,而是一次性生成最终驾驶指令,提高信息处理、决策的效率,并能够应对一些更具挑战性的长尾场景,如几十秒路况的长时序推理等。
最近理想发布的高级工程师招聘细则中,清晰提到的一条「负责研发和落实理想汽车下一代自动驾驶端到端 VLA 大模型算法」,再次证实了 VLA 模型将成为未来方案。
事实上,无论是「一段式端到端」还是「VLA」模型的新型进化,背后都是对 AI 资源的进一步消耗。
模型参数越大,对硬件算力、数据闭环的迭代能力要求越高。
据悉,部署 VLA 模型,对芯片算力等级直接来到了 NVIDA DRIVE Thor,算力高达 1000+TOPS。
资源战打响后,智驾第一梯队与其它玩家的分水岭变得更大了。
在端到端 2.0 时代,性能体验与成本都在朝不同方向无限延伸:
性能走向高处,「车位到车位」成为衡量智驾水平的核心维度;
成本走向低处,高阶智驾正快速落地 20 万元以内的新车。
其它智驾玩家们在前后夹击下,「性价比」的担子更重了。
这也意味着,智驾「第一梯队」走的越来越快,掌握了更多资源,一场马太效应正在行业默默蓄势。
市场很现实,如果不想被规则淘汰,那就只能改写规则。
$理想汽车(NASDAQ|LI)$$小鹏汽车(NYSE|XPEV)$$商汤-WR(HK|80020)$
本文作者可以追加内容哦 !

