方正电机真是“星辰大海”啊!宇树机器狗重磅更新:能载人、侧空翻、上山下水等等引人注目/浙江省人形机器人产业呈区域集中的发展-丽水大力发展专用电机、机电执行器(方正电机是丽水唯一)等部件!
宇树机器狗重磅更新:能载人、侧空翻、上山下水……
财联社 2024年12月24日 07:07 上海
以下文章来源于科创板日报 ,作者小K
科创板日报.
服务新质生产力发展,是科创板、新兴产业及未来产业发展的重要新闻媒体,提供媒体、数据、投行、城市产业发展等服务体系,由上海报业集团主管主办,财联社出品。
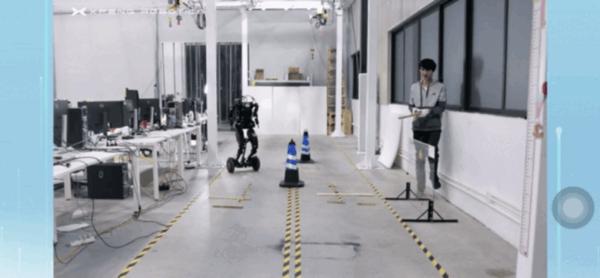
昨日,宇树科技更新一条Unitree B2-W机器狗视频,并配文称,“在发布量产一年后,Unitree B2-W工业轮足,觉醒了更多天赋技能!”
视频显示,目前,Unitree B2-W机器狗可以完成托马斯全旋、侧空翻、360跳跃转体、冲跳、极地跑酷,从极为陡峭的山坡上快速滑下,在浅水中疾行,在溪流中逆流爬坡,从2.8m楼顶跳下、负载40kg前进爬坡,甚至能驮起一名成年男子前行。


从视频中可以看到,在完成上述所有动作的时候,Unitree B2-W机器狗都能保持机身稳定平衡,且行动速度都不低。
值得一提的是,不久前宇树科技创始人CEO王兴兴受访时,谈到人形机器人与机器狗的关联时曾表示,“我们做人形机器人还是非常快的,到现在已经发布了两款人形机器人,第一款去年下半年已经量产发布。因为人形机器人(和机器狗)底层原理比较类似,关节电机、减速器、传感器、电控系统、控制软件、AI 算法等等,我们过去做机器狗的时候把很多底层技术都掌握了,我们自己做的技术还是非常多的。”
如今,以普渡、Figure、Agility、智元、宇树、乐聚、优必选等为代表的机器人主机厂商已陆续开始出货或加速出货。
除了宇树之外,近日,Figure机器人CEO在X平台宣布,Figur02机器人正式交付客户并创收;普渡发布首款全人形机器人PUDU D9;智元机器人官方微信视频号发布更新视频,宣布其多款人形机器人已实现客户工厂部署,今年累计出货将达到962台;此外,Agility、乐聚、优必选等国内外主要整机厂商均通过其官方外宣渠道宣布了其产品出货情况,纷纷迎来商业化。
据中信证券统计,2024年全球人形机器人出货数量将达到2000台以上,正式迎来商业化元年,目前主流厂商在手订单累计已超过1万台,预计2025年全球人形机器人出货将达到1万-2万台。
参考消息--
谁在助力浙江人形机器人加速跑
钱江晚报2024-10-29 10:06
潮新闻客户端 记者 章一琛
10月,全国工商联发布“2024中国民营企业500强”系列榜单,浙江民营企业联手拿下5个“全国第一”,首次实现大满贯。为挖掘浙江民营企业高质量发展典型、探寻未来产业新动能,潮新闻、浙商发展研究院(浙商智库)、《浙商》杂志联合推出“浙派机器人总动员”特别报道,对话企业家、投资人与专家,探究AI时代,浙江机器人产业的深刻变革与无限机遇。
培育人形机器人产业等新经济,是以科技创新创造竞争新优势的重要切入点,更是传统产业主导的浙商群体,向现代产业主导的新浙商转型跨越的重要方向。
人形机器人,正站在时代的前沿风口。在企业创新向前、研发不断突破的同时,政府亦出台政策措施保驾护航,引导与扶持人形机器人产业创新发展。
今年9月,浙江印发的《浙江省人形机器人产业创新发展实施方案(2024—2027年)》(以下简称《实施方案》)提出,力争到2027年,人形机器人产业规模实现跨越式增长,全省整机年产量达到2万台,核心产业规模达到200亿元,关联产业规模达到500亿元。
浙商发展研究院(浙商智库)首席研究员、浙江省发展规划研究院副院长兰建平认为,培育人形机器人产业等新经济,是以科技创新创造竞争新优势的重要切入点,更是传统产业主导的浙商群体,向现代产业主导的新浙商转型跨越的重要方向。
整机+零部件,打造产业协同新高地
锚定人形机器人这一未来产业,浙江有何优势?又将如何发力?
浙江省经信厅未来产业处处长孙体忠介绍,浙江省机器人产业呈区域集中的发展态势,目前基本形成以杭州、宁波为核心,绍兴、台州等地协同发展的产业格局。
《实施方案》明确,浙江将以整机制造为引领,推动整零布局协同化。在整机制造方面,具备科创、区位、人才等先发优势的杭州、宁波,将打造人形机器人整机引领区。在零部件制造方面,将支持各地结合产业特色优势,培育发展配套产业——杭州、宁波着力提升执行控制部件、新型传感器、电子皮肤、先进材料等关键部件供给水平;温州、绍兴、丽水发展专用电机、机电执行器、轴承等零部件;台州、衢州发展精密减速器、伺服系统和新型编码器;湖州、嘉兴则发挥长三角区位优势,积极布局人形机器人零部件配套产业。
整零布局协同化、产业培育集群化,兰建平也对此表示认同。他告诉《浙商》杂志记者,浙江中小企业多、产业细分深、协作配套性好,站在新的时代风口,聚焦产业链、提升创新链、强化供应链,化“单项冠军”为“整机优势”,是浙江人形机器人产业未来发展的突围方向。
《实施方案》同样提出,以强链补链为核心,推动产业培育集群化。在培育壮大企业群体方面,瞄准高校院所和重点人才团队,加强技术成果转化对接服务,超前开展企业孵化;加强高成长预期整机企业的培育支持力度,打造具有生态主导力和全球竞争力的人形机器人“链主”企业;探索差异化要素配置方式,加强人才、金融支持,落实税收优惠政策,提升企业创新能力。
例如衢州龙游,人形机器人已成为当地未来产业的主攻方向。龙游出台的相关政策旗帜鲜明地表示,按照“投早、投小、投科技”的原则,有针对性地实施奖励补助“精准滴灌”,支持人形机器人产业发展。
图片来源:受访者提供
人形机器人+,拓展商业化应用场景
浙江完善的产业链与制造业基础,既是人形机器人产业发展的最大底气,也给予人形机器人企业广阔的应用天地。
《实施方案》明确,浙江将实施“人形机器人+”应用示范工程,面向制造、商贸、建筑、医疗、养老、应急、家政等领域,打造标志性场景和服务。其中,重点聚焦“人形机器人+制造”与“人形机器人+服务”场景,探索创新应用。
以市场需求为导向,推动人形机器人的应用场景多元化,浙商群体已经早早地踏上这样的探索实践之路——
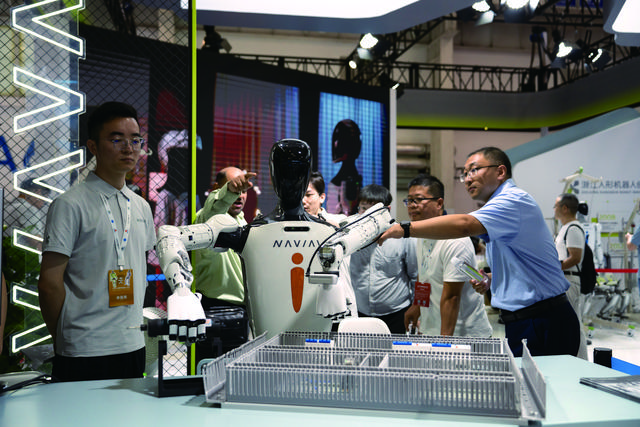
在极氪5G智慧工厂,优必选研发的工业人形机器人Walker S Lite已经投入使用,协调员工执行搬运任务。这一款人形机器人的用户清单里,还有东风、一汽红旗、奥迪一汽等众多响当当的名字。
浙江人形机器人创新中心正探索在家电零部件装配和分拣、家居厨房、展厅导览讲解等场景应用其人形机器人产品“领航者2号NAVIAI”。该创新中心主任熊蓉认为,拓展人形机器人的应用场景,需要定义适合市场需求的产品,打造供应链以降低成本,并面向应用完成各种开发。
率先实现量产的宇树科技人形机器人,如今也正在试点走进工厂。在2024云栖大会上,宇树科技创始人王兴兴、北大-银河通用具身智能联合实验室主任王鹤不约而同地表示,明年将成为人形机器人的工业场景商用元年,“当然,想让人形机器人敲开千家万户的大门,还需要一些时间。”
无论是2024世界机器人大会上的“创历届之最”,还是2024云栖大会、外滩大会等重量级展会上的“出圈式亮相”,人形机器人已充分展现其在实际应用中的潜力和价值。以市场需求为导向,拓展多元化的“人形机器人+”应用场景,我们有理由期待,浙江人形机器人的产业化之路将走得愈远、愈稳健。
“转载请注明出处”
惊人!2024年11月26日授权、鲜为人知的拥有“人形机器人灵巧手电机+液冷”方正电机来了!
--2024年11月26日授权之“一种直线关节模组、端部冷却结构及机器人”的发明专利令浙江方正电机旗下机器人公司携最新“十大人形机器人发明专利”掀起了其‘人形机器人’的新篇章!
2024年11月26日授权发明专利--
一种直线关节模组、端部冷却结构及机器人:

实用新型CN202420771176.6
专利生命周期摘要及附图基本信息权利要求书说明书
专利生命周期

专利申请
2024-04-15
授权
2024-11-26
预估到期
2034-04-15
摘要及附图
专利原文
摘要
本实用新型涉及一种直线关节模组、端部冷却结构及机器人,一种直线关节模组端部冷却结构,包括外壳体和端盖A,所述端盖A固定在外壳体的一端,且外壳体和端盖A之间通过冷却板分隔,所述端盖A内部中空,且填充有冷却液,所述端盖A的外壁上设有冷却液注入口,所述外壳体内还设有电路板,所述电路板贴合固定在冷却板上。本实用新型的端盖兼备散热及承受轴向力能力;在整个直线关节模组的结构远端温度较低,冷却液液化,潜热释放;实现对热源(控制器结构)的冷却及零件整体的温度平衡。
附图
基本信息
专利名称一种直线关节模组、端部冷却结构及机器人专利类型实用新型注册地区中国大陆法律状态
有效-审定授权
简单法律状态
有效
申请日期2024-04-15申请号CN202420771176.6授权公告号CN222060377U授权公告日2024-11-26当前申请(专利权)人浙江方德机器人关节科技有限公司原始专利权人
-
发明人/设计人高志川、金启前、牛铭奎代理机构杭州丰禾专利事务所有限公司代理人徐金杰IPC/LOC分类
B25J17/02 肘节
B25J19/00 与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置(一般安全装置入F16P;一般防辐射装置入G21F)
GBC分类
C3491 工业机器人制造
权利要求书
1.一种直线关节模组端部冷却结构,其特征在于:包括外壳体(1)和端盖A(2),所述端盖A(2)固定在外壳体(1)的一端,且外壳体(1)和端盖A(2)之间通过冷却板(6)分隔,所述端盖A(2)内部中空,且填充有冷却液,所述端盖A(2)的外壁上设有冷却液注入口(21),所述外壳体(1)内还设有电路板(7),所述电路板(7)贴合固定在冷却板(6)上。 2.根据权利要求1所述的一种直线关节模组端部冷却结构,其特征在于:所述冷却板(6)中部朝远离外壳体(1)的一侧凸起,形成容纳电路板(7)上的电子元器件的凹口。 3.根据权利要求1所述的一种直线关节模组端部冷却结构,其特征在于:所述冷却液注入口(21)与冷却板(6)垂直设置,且冷却液注入口(21)上还设有堵头。 4.根据权利要求1所述的一种直线关节模组端部冷却结构,其特征在于:所述端盖A(2)成圆台状,且端盖A(2)的内壁沿圆周间隔设置多个加强筋。 5.根据权利要求1所述的一种直线关节模组端部冷却结构,其特征在于:所述端盖A(2)与外壳体(1)连接一端的端面还设有一圈外缺口,所述外缺口卡设在外壳体(1)端部,端盖A(2)与外壳体(1)之间通过螺栓紧固。 6.根据权利要求1所述的一种直线关节模组端部冷却结构,其特征在于:所述端盖A(2)与外壳体(1)连接一端的端面还设有一圈内缺口,所述冷却板(6)卡设在内缺口上,端盖A(2)与冷却板(6)之间通过焊接固定。 7.一种直线关节模组,其特征在于:包括如权利要求1至6任意一项所述的端部冷却结构,所述外壳体(1)的内壁上固定有定子,所述外壳体(1)内通过轴承还设有螺母(5),所述螺母(5)的外壁上还设有转子铁芯,所述螺母(5)内还设有移动杆(4),所述移动杆(4)通过螺纹滚柱与螺母连接,所述外壳体的另一端还固定有端盖B(3),所述移动杆(4)贯穿端盖B(3)。 8.机器人,其特征在于:采用如权利要求7所述的直线关节模组。
说明书
技术领域
本实用新型属于智能机械技术领域,更具体地说,是涉及一种直线关节模组、端部冷却结构及机器人。
背景技术
直线关节能够输出大推力直线运动,适用于机器人中。机器人动力关节作为机器人的动力单元,是整个系统的核心单元。仿人机器人模拟人类的走、跑、跳等运动模式,要求动力关节具有瞬时高爆发力、高转矩密度输出。动力关节长时间高负荷工作,必然会产生巨大的能量,且关节动力部件安装空间狭小,通风散热条件差,热量不能及时散出,造成关节动力部件瞬时发热严重。长久如此,会影响关节动力部件及关节的使用寿命,极限工况可能会导致关节的不可逆故障。 与常规旋转关节模组相比,直线关节外径更小,可以平行安装在机器人外骨骼结构中,对于安装空间需求减少;但是也由于直线关节体积小,使得内部的器件结构更加紧凑,常规通过自然冷却的方式来进行散热,散热效率相对低效,已无法满足需求。
发明内容
为了解决上述技术问题,本实用新型的第一个目的在于提供一种直线关节模组端部冷却结构,该结构能提高直线关节模组的散热效率;本实用新型的第一个目的在于提供一种直线关节模组;本实用新型的第三个目的在于提供机器人。 为了实现上述第一个实用新型目的,本实用新型采用以下技术方案: 一种直线关节模组端部冷却结构,包括外壳体和端盖A,所述端盖A固定在外壳体的一端,且外壳体和端盖A之间通过冷却板分隔,所述端盖A内部中空,且填充有冷却液,所述端盖A的外壁上设有冷却液注入口,所述外壳体内还设有电路板,所述电路板贴合固定在冷却板上。 作为优选方案:所述冷却板中部朝远离外壳体的一侧凸起,形成容纳电路板上的电子元器件的凹口。 作为优选方案:所述冷却液注入口与冷却板垂直设置,且冷却液注入口上还设有堵头。 作为优选方案:所述端盖A成圆台状,且端盖A的内壁沿圆周间隔设置多个加强筋。 作为优选方案:所述端盖A与外壳体连接一端的端面还设有一圈外缺口,所述外缺口卡设在外壳体端部,端盖A与外壳体之间通过螺栓紧固。 作为优选方案:所述端盖A与外壳体连接一端的端面还设有一圈内缺口,所述冷却板卡设在内缺口上,端盖A与冷却板之间通过焊接固定。 为了实现上述第二个实用新型目的,本实用新型采用以下技术方案: 一种直线关节模组,包括如上任意一项所述的端部冷却结构,所述外壳体的内壁上固定有定子,所述外壳体内通过轴承还设有螺母,所述螺母的外壁上还设有转子铁芯,所述螺母内还设有移动杆,所述移动杆通过螺纹滚柱与螺母连接,所述外壳体的另一端还固定有端盖B,所述移动杆贯穿端盖B。 为了实现上述第三个实用新型目的,本实用新型采用以下技术方案: 机器人,采用如上所述的直线关节模组。 本实用新型的端盖兼备散热及承受轴向力能力;在整个直线关节模组的结构远端温度较低,冷却液液化,潜热释放;实现对热源(控制器结构)的冷却及零件整体的温度平衡。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。 需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、部件和/或它们的组合。 此外,在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。 此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。 在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。 在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。 下面结合附图与实施例对本实用新型作进一步说明: 如图1和图2所示的一种直线关节模组,包括外壳体1和端盖A2,所述端盖A2固定在外壳体1的一端,且外壳体1和端盖A2之间通过冷却板6分隔,所述端盖A2内部中空,且填充有冷却液,所述端盖A2的外壁上设有冷却液注入口21,所述外壳体1内还设有电路板7,所述电路板7贴合固定在冷却板6上,所述外壳体1的内壁上固定有定子,所述外壳体1内通过轴承还设有螺母5,所述螺母5的外壁上还设有转子铁芯,所述螺母5内还设有移动杆4,所述移动杆4通过螺纹滚柱与螺母连接,所述外壳体的另一端还固定有端盖B3,所述移动杆4贯穿端盖B3。 所述冷却板6中部朝远离外壳体1的一侧凸起,形成容纳电路板7上的电子元器件的凹口。所述冷却板6与端盖A2通过过搅拌摩擦焊连接,所述端盖A2成圆台状,且端盖A2的内壁沿圆周间隔设置多个加强筋。整体结构强度更高,更加结实耐用,同时,将冷却液从冷却液注入口21中倒入端盖A2内,使得整个端盖A2充满冷却液,从而能对贴合冷却板的电路板以及伸入凹口内的电子元器件起到更好的冷却作用。所述冷却液注入口21与冷却板6垂直设置,且冷却液注入口21上还设有堵头,堵头的设置能够方便冷却液的更换以及防止正常使用时冷却液的泄漏。 所述端盖A2与外壳体1连接一端的端面还设有一圈外缺口,所述外缺口卡设在外壳体1端部,端盖A2与外壳体1之间通过螺栓紧固。所述端盖A2与外壳体1连接一端的端面还设有一圈内缺口,所述冷却板6卡设在内缺口上,端盖A2与冷却板6之间通过焊接固定。上述定位结构使得电路板与端盖、端盖与外壳体安装时能够有个初步的定位,安装更加方便。 机器人,采用如上所述的直线关节模组。 在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。 尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
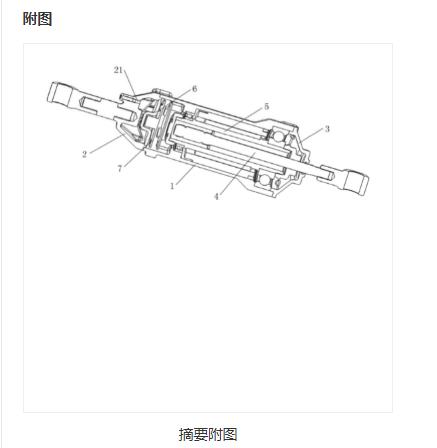
附图说明
构成本申请的一部分的说明书附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的限定。 图1是本实用新型的整体结构示意图; 图2是本实用新型的剖面结构示意图。 附图标记为:1、外壳体;2、端盖A;3、端盖B;4、移动杆;5、螺母;6、冷却板;21、冷却液注入口;7、电路板。
浙江方正电机旗下机器人公司又一最新发明专利掀起了其‘人形机器人’的新篇章!
发明专利--



1、一种人形机器人手臂总成
发明专利CN202410914886.4
专利生命周期摘要及附图基本信息权利要求书说明书
专利生命周期
专利申请
2024-07-09
公布
2024-09-24
授权
预估到期
2044-07-09
摘要及附图
专利原文
摘要
本发明涉及一种人形机器人手臂总成,包括第一关节机构、第二关节机构和推拉杆关节机构,第一关节机构包括第一连接支架、关节电机模组以及第二连接支架,第一连接支架包括两个固定盘,两个关节电机模组的输出端分别与两个固定盘固定,第二连接支架包括连接盘和固定环B,固定环B套设固定在一个关机电机模组上,连接盘与第三个关节电机模组的输出端固定;推拉杆关节机构包括关节电机模组、拉杆以及悬吊支架组件,悬吊组件使得两个关节电机模组相互垂直,拉杆的两端分别与两个关节电机模组连接;关节电机模组包括电机、谐波减速器和控制器总成,本发明的总成散热效果好;安装方便,且整个手臂活动更加灵活。
附图

摘要附图
基本信息
专利名称一种人形机器人手臂总成专利类型发明专利注册地区中国大陆法律状态
审中-发明公开
简单法律状态
审中
申请日期2024-07-09申请号CN202410914886.4公布公告号CN118682808A公布公告日2024-09-24授权公告号-授权公告日-当前申请(专利权)人浙江方德机器人关节科技有限公司原始专利权人
-
发明人/设计人牛铭奎、高志川、张鸿、金启前代理机构杭州丰禾专利事务所有限公司代理人徐金杰IPC/LOC分类
B25J17/00 接头
B25J9/12 电的〔4〕
B25J19/02 读出装置〔4〕
B25J19/00 与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置(一般安全装置入F16P;一般防辐射装置入G21F)
GBC分类
C3491 工业机器人制造
C3491 工业机器人制造
。。。。。。
2、一种集成无线传输的扭矩传感器的机器人关节模组
发明专利CN202410688892.2
专利生命周期摘要及附图基本信息权利要求书说明书
专利生命周期
专利申请
2024-05-30
公布
2024-10-15
授权
预估到期
2044-05-30
摘要及附图
专利原文
摘要
本发明涉及一种集成无线传输的扭矩传感器的机器人关节模组,包括中间固定轴以及依次连接传动的电机模块、减速器模块、扭矩传感器模块,电机模块的一端设有控制器线路板,且控制器线路板的外侧还固定有保护盖,中间固定轴贯穿电机模块和减速器模块,且一端与保护盖固定,另一端固定有第一电路板组件,第一电路板组件上的线路通过中间固定轴的过线孔连接至控制器线路板,扭矩传感器模块上固定有第二电路板组件,第二电路板组件与第一电路板组件之间通过无线收发模块进行数据传输,且通过磁耦合形成无线供电。本发明的结构主要应用于机器人手臂关节,解决了传统的有线扭矩传感器线路缠绕易损的问题,大大提高了关节模组整体的使用寿命。
附图

摘要附图
基本信息
专利名称一种集成无线传输的扭矩传感器的机器人关节模组专利类型发明专利注册地区中国大陆法律状态
审中-发明公开
简单法律状态
审中
申请日期2024-05-30申请号CN202410688892.2公布公告号CN118769292A公布公告日2024-10-15授权公告号-授权公告日-当前申请(专利权)人浙江方德机器人关节科技有限公司原始专利权人
-
发明人/设计人高志川、张鸿、俞斌全、顾瑜芯代理机构杭州丰禾专利事务所有限公司代理人徐金杰IPC/LOC分类
B25J17/00 接头
B25J9/00 程序控制机械手
B25J9/10 以机械手元件定位装置为特征的〔4〕
B25J9/12 电的〔4〕
B25J13/08 通过读出装置,例如观察或触摸装置〔4〕
GBC分类
C3491 工业机器人制造
C3491 工业机器人制造
权利要求书
1.一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:包括中间固定轴(4)以及依次连接传动的电机模块(1)、减速器模块(2)、扭矩传感器模块(3),所述电机模块(1)的一端设有控制器线路板(16),且控制器线路板(16)的外侧还固定有保护盖(17),所述中间固定轴(4)贯穿电机模块(1)和减速器模块(2),且一端与保护盖(17)固定,另一端固定有第一电路板组件,第一电路板组件上的线路通过中间固定轴(4)的过线孔(41)连接至控制器线路板(16),所述扭矩传感器模块(3)上固定有第二电路板组件,第二电路板组件与第一电路板组件之间通过无线收发模块进行数据传输,且第一电路板与第二电路板之间通过磁耦合形成无线供电。
2.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述第一电路板包括第一支架(35)以及固定在第一支架(35)的两侧的线路板A(36)和线路板B(37),第一支架(35)固定套设在中间固定轴(4)端部,线路板A(36)与线路板B(37)电连接;所述第二电路板包括第二支架(32)以及固定在第二支架(32)的两侧的线路板C(33)和线路板D(34),第二支架(32)固定在扭矩传感器模块(3)内,线路板C(33)与线路板D(34)电连接,所述线路板D(34)、线路板A(36)上分别设有线圈,通过磁耦合使得线路板A(36)对线路板D(34)无线供电。
3.根据权利要求2所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述扭矩传感器模块(3)包括壳体C(31),所述壳体C(31)的外壁上设有应变片,所述应变片与第二电路板组件电连接。
4.根据权利要求3所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述应变片为四组,四组应变片等距间隔设置,每组为两片,所述壳体C(31)上还设有凹槽,所述应变片成45斜贴在凹槽内。
5.根据权利要求3所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述应变片与线路板C(33)通过导线连接,四组应变片组成一个惠斯通全桥电路。
6.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述扭矩传感器模块(3)上还固定有永磁体,所述第一电路板组件上还设有与永磁体相配合的磁传感器。
7.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述电机模块(1)包括壳体A(11)、定子(12)、转子铁芯(13)和转轴(14),所述定子(12)固定在壳体A(11)内,所述转子铁芯(13)固定在转轴(14)上,所述壳体A(11)的一端还固定有前端盖(15),所述转轴(14)为空心轴,两端分别与壳体A(11)和前端盖(15)转动连接,所述中间固定轴(4)穿设在转轴(14)中,且与转轴(14)之间设有支撑轴瓦(42)。
8.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述减速器模块(2)为谐波减速器模块或行星齿轮减速器模块。
9.根据权利要求7所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述减速器模块包括输入凸轮(21)、柔轮(22)、壳体B(23)和输出轮(24),所述输入凸轮(21)中部设有供中间固定轴(4)穿过的通孔,所述输入凸轮(21)与转轴(14)固定,所述柔轮(22)通过轴承设置在输入凸轮(21)外,且柔轮(22)的一端与壳体B(23)固定,所述输出轮(24)通过轴承设置在壳体B(23)内,且由柔轮(22)传动。
10.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述保护盖(17)与壳体A(11)的一端固定,且保护盖(17)与壳体A(11)的端面形成安装控制器线路板(16)的保护腔。
参考消息--
2024年世界机器人大会将于8月21日在北京举行/小鹏携手方正电机全新机器手首次亮相!
--小鹏推出双足智能机器人/方正电机官方表示:公司联合小鹏合作研发小鹏机器人PX5,为其提供相关智能配件!
小鹏全新机器手首次亮相!钢铁助理帮何小鹏下单小鹏Mona M03
驱动之家
2024-08-12 10:52发布于河南
+关注
快科技8月12日消息,小鹏汽车董事长何小鹏今日发视频称,以后我们不仅仅是在互联网有“嘴替”了,现实生活中也有“手替”了。
何小鹏称,这几天MONA M03预订火爆,他让钢铁助理也体验一下预订流程,流程蛮顺畅。
机器手灵活度高且拥有触觉能力,未来可以在工业场景中处理非常精细的任务,对标了人手的灵活度和触觉能力。
从视频中来看,机器手的手指头可灵活弯曲,指头还能精准触摸手机屏幕进行操控。(视频点此观看)

据悉,小鹏与特斯拉是仅有的能生产人形机器人的车企,去年10月24日的小鹏科技日上,小鹏汽车首次展示了自研的人形机器人。
该机器人身高1.5米,两条腿高度拟人化,能够在碎石子和松软的草皮上行走,甚至能够踢足球和骑平衡车。
何小鹏曾介绍,这款双足人形机器已达到稳定行走的能力,可以完成各类双足行走越障,它可以直膝行走,能大步行走,还具备全地形稳定行走能力。

何小鹏表示,小鹏的AI及大型硬件新进展,将于今年内向大家同步。

免责声明:本内容来自腾讯平台创作者,不代表腾讯新闻或腾讯网的观点和立场。
小鹏PX5第二代人形机器人于2024年11月6日发布!合作伙伴方正电机来了!
小鹏PX5第二代人形机器人将于2024年11月6日发布/PX5是最早参与到英伟达Projec GR00T计划的全球人形机器人之一!
--值得一提的是,PX5是最早参与到英伟达Projec GR00T计划的全球人形机器人之一(下图右一),可以理解为在GR00T训练下,新一代人形机器人或许可以做更多自主任务。当然,我们要等小鹏最新的公布和演示!
--小鹏第二代人形机器人将于2024年‘1024科技日’亮相-合作伙伴方正电机布局机器人关节-站上‘封口’啊!
本文作者可以追加内容哦 !

