$汉威科技(SZ300007)$ 惊呆了!汉威科技的完整的各类传感器可能让机器人获得类似人类皮肤般的全方位感知能力,并且有可能大大提升运动规划和避障效果。对标苹果和特斯拉
苹果进军人形机器人!26倍英伟达计算效率,新感知系统避障更高效
机器人大讲堂
2025-01-01 16:30安徽优质科技领域创作者
关注
关于苹果涉足人形机器人领域的传闻如今已甚嚣尘上。
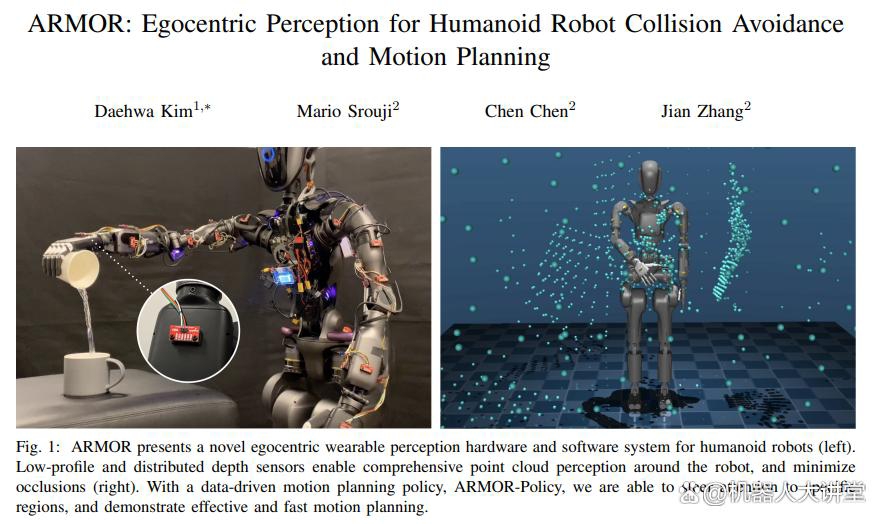
而近日,该公司确实迈出了新的一步——研发了一套名为ARMOR的机器人感知系统。
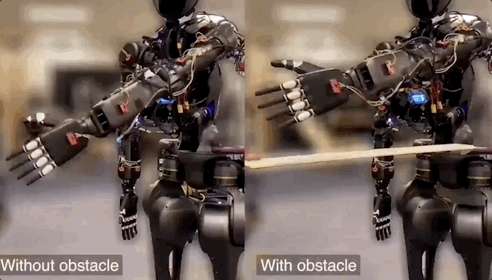

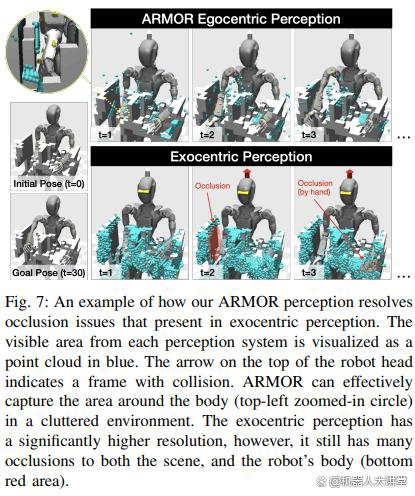
该系统通过在人形机器人身上分布式布局一系列深度传感器,让机器人获得了类似人类皮肤般的全方位感知能力,大大提升了运动规划和避障效果。
创新型分布式传感器部署方案
传统人形机器人的感知系统往往是在头部或躯干安装高分辨率相机和激光雷达。这种方案虽然集成简单,但视野容易被手臂和其他部件遮挡,难以获得完整的环境信息。
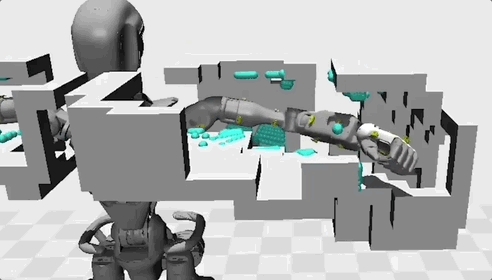
ARMOR系统的创新之处在于采用分布式感知方案。研究团队在机器人的手臂和手掌上战略性地布置了40个小型ToF激光雷达传感器,每边手臂20个。这些传感器体积小巧,成本低廉,功耗低,可以为机器人提供全方位的点云感知,最大程度减少了盲区。

具体来说,使用的是SparkFun VL53L5CX激光雷达传感器,尺寸仅6.4×3.0×1.5毫米。单个传感器可以以15Hz的频率(特定配置下最高30Hz)采集8×8分辨率的深度图像,对角视场角63,探测范围4000毫米。
团队将4个传感器连接到一个XIAO ESP微控制器上,通过I2C总线读取数据。然后每个微控制器通过USB将数据传输到机器人的板载计算机(Jetson Xavier NX)。最后通过无线方式将传感器数据流传输到Linux主机上的NVIDIA GeForce RTX 4090 GPU进行处理。这种架构确保了即使在多个传感器同时工作的情况下也能维持15Hz的刷新率。
智能避障算法突破性创新
ARMOR不仅在硬件上实现了创新,其基于深度学习的避障策略同样亮眼。研究团队基于Transformer架构开发了ARMOR-Policy,让机器人能够快速高效地规划无碰撞轨迹。
该策略的核心是一个条件生成模型,它可以基于当前关节状态、目标位置、ToF激光雷达观测值以及潜变量z来预测未来的动作序列。网络采用了类似ACT(Action Chunking Transformers)的编码器-解码器结构。
为了处理40个分布式ToF传感器的输入,研究团队对网络架构做了特殊设计。每个8×8分辨率的深度图像都会经过修改版的单通道ResNet18骨干网络,提取出512维特征。这些特征随后会被输入Transformer进行处理,最终输出k个动作序列预测。整个网络包含约8400万个参数。
考虑到避障规划通常存在多个可行解,ARMOR-Policy还引入了行为编码器来建模这种多样性。通过调整潜变量z,系统可以生成不同的运动轨迹候选。这为后续的推理时优化提供了基础。
在实际应用中,ARMOR-Policy会并行采样N个候选轨迹,然后使用signed distance function(SDF)来评估它们与障碍物的距离,选择最优路径。由于计算都在GPU上完成,这个优化过程几乎不会带来额外延迟。
真实人类动作数据助力训练
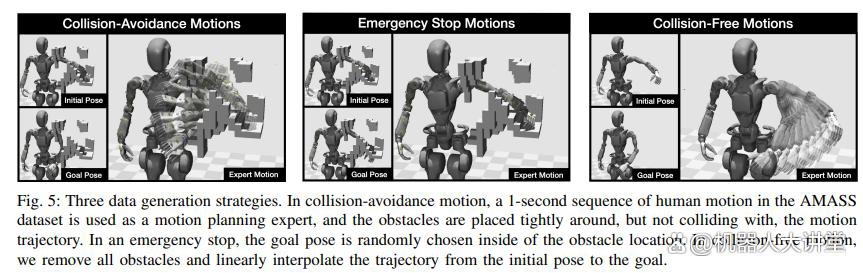
为了训练这个智能避障策略,研究团队别出心裁地利用了AMASS数据集中的人类动作数据。不同于以往工作主要关注特定任务场景(如货架、柜子等),ARMOR追求更通用的操作能力。
研究人员从AMASS中收集了超过31万个动作序列,总时长达86.6小时。这些数据涵盖了各种真实的人类动作,包括物体操作、社交行为、舞蹈等。这些丰富多样的动作为机器人提供了宝贵的学习范例。
数据处理的第一步是将人类动作重定向到机器人关节配置上。AMASS数据集提供了每个关节绕各轴的旋转向量。对于手肘和手腕这样的单轴关节,可以直接使用对应的角度。而对于更复杂的肩部,则需要结合锁骨和肩膀的角度进行启发式映射。
突破性实验验证系统效果
研究团队进行了大量实验来验证ARMOR系统的性能。他们将ARMOR与传统的外部相机方案进行对比,后者使用4个Intel RealSense D435相机(一个安装在头部,另外三个分别位于左右前方)。
实验结果令人惊喜。当使用ARMOR-Policy时,相比传统方案,碰撞减少了63.7%,成功率提高了78.7%。即使是没有推理时优化的基础版ACT-Depth策略,使用ARMOR感知系统也能带来显著提升。
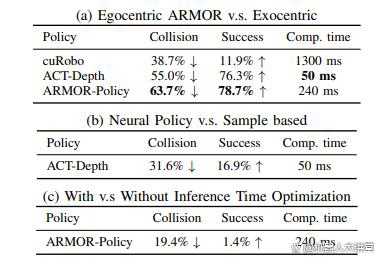
研究人员还将ARMOR-Policy与基于采样的运动规划器cuRobo进行了比较。在使用相同的ARMOR感知系统的情况下,ACT-Depth策略比cuRobo减少了31.6%的碰撞,成功率提高了16.9%。更重要的是,计算速度提升了26倍,从cuRobo的1300ms降至50ms。
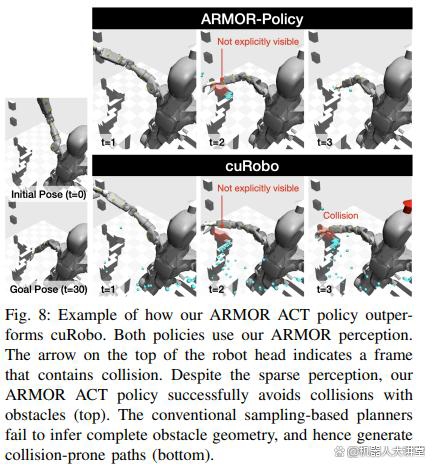
ARMOR的优势在拥挤环境中表现得尤为明显。比如在类似抽屉或柜子内部这样的狭小空间里,传统的外部相机往往会因为遮挡而失效。而ARMOR的分布式传感器可以为机器人提供清晰的近距离感知,让它能更灵活地规划动作。
最后,研究团队已经成功将ARMOR系统部署在了傅利叶GR-1机器人上,安装了28个ToF激光雷达传感器,实现了15Hz的实时轨迹规划和避障控制。这个成果展示了ARMOR在实际应用中的可行性。
未来发展与应用前景展望
研究团队计划在后续工作中进一步拓展ARMOR的应用场景。特别是在复杂的灵巧操作任务中,分布式的近距离感知有望帮助机器人实现更精确的动作控制。此外,这种类似人类皮肤的感知方式,也为实现更自然的人机交互开辟了新的可能。
ARMOR也为人形机器人的发展提供了新的思路。它展示了分布式感知和深度学习结合的潜力,也证明了从人类生物特征中汲取灵感的价值。通过模仿人类皮肤的分布式感知方式,ARMOR让机器人获得了更全面的环境感知能力,为实现更智能灵活的机器人控制奠定了基础。$创业板指(SZ399006)$ $上证指数(SH000001)$ #【聊感悟】回顾2024投资体验,展望2025新年期待# #证监会扩大互换便利参与机构范围# #银行板块成2024年A股最大赢家# #数据产业有望迎来新一轮高速发展# #算力即国力!板块迎多个利好催化#
本文作者可以追加内容哦 !

