英伟达继续秉承“卖铲人”的战略定位,黄仁勋提出将继续与全球多家知名的机器人解决方案提供商、操作系统企业、【AI视觉技术公司】、【机器人传感器制造商】以及本体制造企业等携手合作,共同打造机器人生态系统。
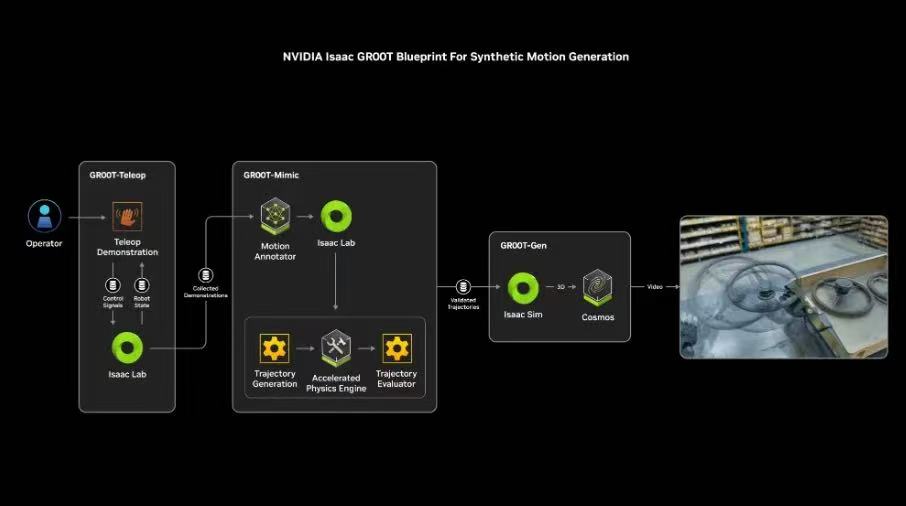
基于 NVIDIA Omniverse 和 NVIDIA Cosmos 平台构建的 GR00T - 生成(Gen)工作流程通过域随机化和 3D 放大以指数方式扩展该数据集。这个数据集随后可以作为输入,用于在NVIDIA Isaac Lab(一个开源的机器人学习模块化框架)中训练机器人,使它们能够高效且安全地移动并与环境进行交互。

追加内容
本文作者可以追加内容哦 !

