厉害啊!方正电机携“10大人形机器人发明专利”迎多个“机器人关节项目”配套爆品!保密原因曝光:大股东湖州人民政府拥有的机器人产业园迎来哈工大、浙江大学等等大量中国最新顶尖的“人形机器人”项目啊!
参考消息--
参考消息--
湖州西湖区创新机器人产业吸引全球青年人才,未来已来!
2024-10-01 09:28
发布于:北京市
9月29日,西湖区迎来了百余名国内外青年人才,聚焦于机器人产业的创新与发展。在石虎山机器人创新基地,留学生们与最新技术的机器狗“绝影”亲密接触,展现出对于AI应用的浓厚兴趣。这款机器狗由云深处科技研发,已在工厂巡检、消防应急及建筑测绘等领域显示出其潜力,证明了西湖区不仅是科技创新的热土,更是青年人才的理想归属。这场秋日的邂逅,不仅凸显了西湖区在智能机器人产业中的转型升级,更反映出新一代科技追求者的迫切愿景。
随着科技的不断进步,人人皆可成为智能化的受益者。西湖区依托浙江大学各类创新团队及设施,推动着机器人技术的快速发展与产业应用。这种校地合作的模式,不仅促进了人才的引进与技术成果的转化,更为机器人产业链的整合提供了良好的基础。已经有超过30家产业链企业入驻这一创新基地,形成了强大的技术集聚效应。这样的发展模式不仅激发了科研团队的创新能力,同时也为青年人才提供了更为广阔的舞台和机会。
云栖小镇内,五八智能科技(杭州)有限公司的负责人向国际嘉宾详细介绍了公司研发的“D11”系列智能人形机器人。这些机器人已经进入大型工厂进行应用测试,能够高效完成物料搬运、扫码贴签与分拣等任务,展现出智能机器人的多样化运用空间。这种快速的测试与反馈机制,确保了产品的不断优化与迭代,加速了机器人技术在行业内的普及。这一切,不仅是企业责任的集体体现,更是科技创新的集大成者,照亮了未来的智能化生活。
在如此快速发展的科技行业背景下,吸引全球人才成为关键。西湖区通过政府引导与政策支持,积极探索科技成果转化新机制与产学研合作新模式。其中,《西湖区青年人才十条》的发布,为青年人才提供实习津贴、科研补助等一系列扶持政策,创造出一个更加友好的创新环境。这样的措施不仅拉近了青年人才与产业的距离,增强了科研的活力,也有效提高了西湖区作为科技创新高地的吸引力。通过这样的产业政策,未来西湖区可能会成为更多年轻人追逐科技梦想的福地。
未来,对于机器人产业的展望充满了无限可能。各类先进的机器人技术将在工厂、家庭及其他多个领域逐渐普及,提高生产效率及生活品质。面对全球科技的竞赛,西湖区如能持续保持其开放、创新的态度,必将在智能科技发展浪潮中占据重要的地位。正如参与者所言,西湖区的成功已不仅仅在于其技术领先与配套齐全,更在于它被视作一个理想的“造梦工厂”。在这个充满激情与希望的时代,西湖区将继续吸引更多的科技人才,共同书写智能机器人的未来。
参考文献--
瞠目结舌!方正电机携“10大人形机器人发明专利”与黄仁勋站台的小鹏PX5、台积电投入使用优艾智合的移动复合机器人为其提供相关智能配件啊!专业投资机构早已提前发布“相关研报”啊!
--方正电机布局机器人关节-站上‘封口’曾三连板啊!
首页 > 科技周边 > 人工智能
国产人形机器人问世,概念板块掀起涨停潮(附产业链个股梳理)
WBOY
发布: 2023-11-20 14:25:51
转载
1190人浏览过
11月20日,机器人概念股出现大幅上涨,个别个股触发涨停板,其中包括赛为智能、万集科技等。此次涨停潮还席卷了延华智能、南京熊猫、科力尔等近十只个股。消息面上,上周发布了三款国产机器人,分别是傅立叶的gr-1人形机器人、开普勒人形机器人k1以及基于开源鸿蒙系统的专业级人形机器人
GR-1人形机器人的量产如期而至,傅立叶智能微信视频号在11月16日发布了相关视频
11月17日,开普勒人形机器人发布开普勒先行者系列通用人形机器人K1,该机器人搭配红外双目3D摄像头、远场四麦线性整列听觉传感器、自研行星滚柱丝杠、自研旋转执行器、12个自由度灵巧手等。
11月17日,深圳开鸿数字产业发展有限公司与乐聚机器人宣布,首款基于开源鸿蒙系统的专业级人形机器人正式发布。
人形机器人具备独特的优势。首先,它更具通用性,可以适应复杂的人类社会应用场景。人形机器人无需改变原有工作环境,一旦产品成熟,就可以直接应用于各种需求场景。由于其与人类相似的特征,人形机器人可以更好地满足现有需求。最初可能应用于To B领域,为那些需要人工替代的无聊、重复性高,或者危险、损害人类健康的场景提供服务。随后,它可能满足与人类互动更紧密的服务行业需求。其次,人形机器人将推动具身智能的发展。具身智能是通向人工智能的关键,它是能够理解、推理并与物理世界互动的智能系统,赋予机器人在实践中学习的能力,将成为人工智能的下一波浪潮。人形机器人有望成为未来人工智能的主要输出渠道,连接虚拟与现实,带来更广泛、更直接的效益
机构认为,在特斯拉人形机器人商业化不断推进之际,国产的人形机器人也在不断涌现,商业化全面提速,看好人形机器人商业化前景与市场空间。
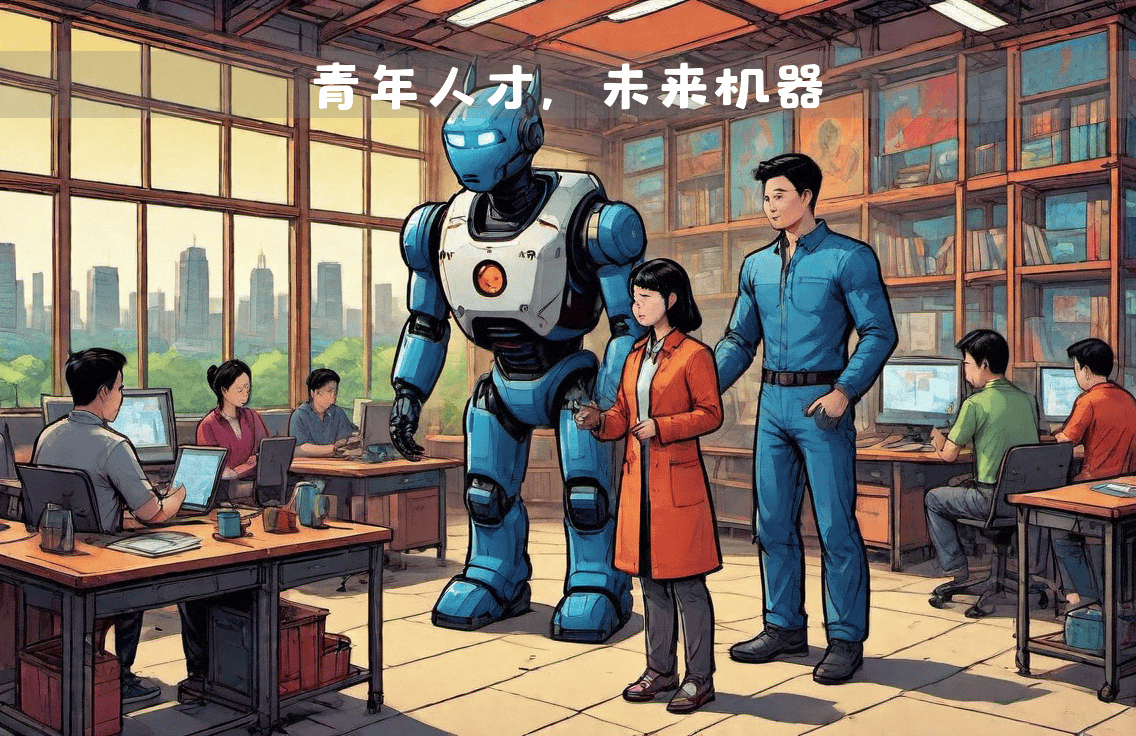
图片来源:中邮证券
以上就是国产人形机器人问世,概念板块掀起涨停潮(附产业链个股梳理)的详细内容,更多请关注php中文网其它相关文章!
机器人概念股--方正电机:‘某某专利’系用于机器人关节电机的开发制造!
方正电机互动e—
公司下属研究院新获得专利“一种分段斜极骨架外转子电机”是否用于机器人关节制造?
方正电机股友2023-12-28 09:36:36来自广东
公司下属研究院新获得专利“一种分段斜极骨架外转子电机”是否用于机器人关节制造?
方正电机
方正电机:你好,该专利系用于机器人关节电机的开发制造,谢谢。
(来自深交所互动易)答复时间 2024-02-06 15:38:52
根据 7 条资料总结
分析问题
全网精选 7 篇资料
1. 一种分段斜极骨架外转子电机的制作方法
www.xjishu.com
2. 方正电机:“一种分段斜极骨架外转子电机”系用于机器人关节电机的开发制造 每经网
每经网
3. 方正电机最近获得了“一种分段斜极骨架外转子电机”的专利,这种专利用于机器人关节电-东方财富网股吧
东方财富网股吧
4. 一种分段斜极电机转子制造技术_技高网
www.jigao616.com
5. 一种永磁同步电机转子分段斜极结构的制作方法
www.xjishu.com
6. 一种分段斜极电机转子及生产方法.pdf-原创力文档
max.book118.com
7. 一种分段斜极式EPS无刷电机转子的制作方法
www.xjishu.com
总结答案
分段斜极骨架外转子电机1
概述: 7
技术领域:
本发明涉及一种电机转子结构,特别是用于机器人关节电机、新能源汽车电机、飞行汽车涵洞风扇电机等3。
技术方案: 7
提供一种分段斜极骨架外转子电机,通过V形斜极设计降低齿槽力矩,提高电机运行平稳性和性能1。
结构特点:
包括壳体、磁钢骨架和磁钢1。
磁钢骨架固定在壳体内壁,沿周向方向开设有多个V形磁钢槽1。
磁钢槽内安装有磁钢,形成V形斜极,抵消外转子轴向力,降低齿槽转矩和谐波反电势1。
优化设计:
磁钢槽开口朝壳体圆周方向,V字形夹角为斜极角度1。
磁钢骨架包括同轴设置的两个骨架环,之间通过多个连接杆连接,一体成型,材质为塑料1。
应用领域:
该电机部件主要用于新能源汽车电机、飞行汽车涵洞风扇电机和机器人关节手臂电机3。
生产方法:
通过分段铁芯和转子中心轴结构设计,实现各段铁芯按特定角度错开,优化齿槽转矩4。
优势: 7
结构一致性强、简单、制造方便、生产效率高、可靠性高5。
有效降低电机齿槽转矩,提升电机控制精度、转矩平稳性,以及整车的NVH性能5。
结论: 7
- 分段斜极骨架外转子电机通过其独特的设计,有效提升了电机的性能,特别是在降低齿槽转矩和提高运行平稳性方面表现出色,适用于多种高性能电机应用领域1
参考消息--
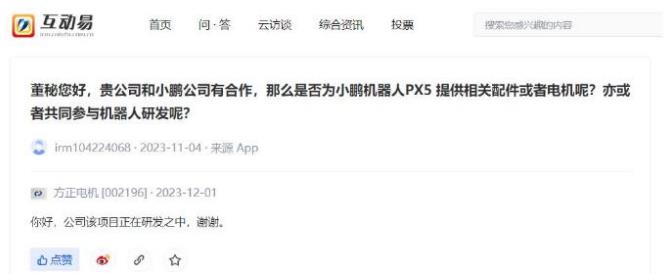
瞠目结舌啊!”小鹏PX5“人形机器人是最早参与到英伟达Projec GR00T计划的全球顶尖人形机器人之一/方正电机联合小鹏合作研发小鹏机器人PX5,为其提供相关智能配件!
--值得一提的是,PX5也是最早参与到英伟达Projec GR00T计划的全球人形机器人之一,可以理解为在GR00T训练下,新一代人形机器人或许可以做更多自主任务。
上天入地的小鹏,要推出新一代人形机器人 |CyberDaily!
CyberDaily CyberDaily 2024年08月29日 16:51 广东
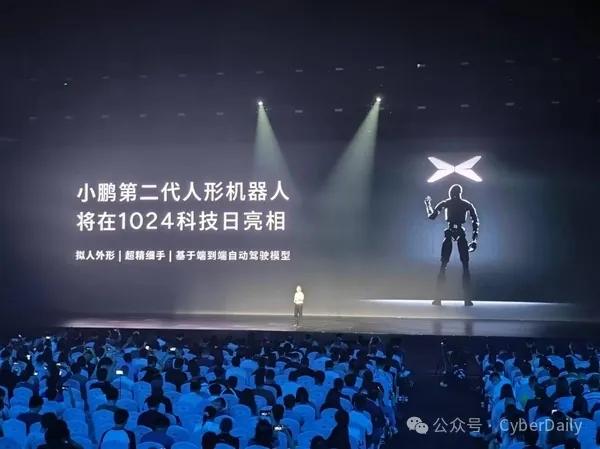
封面:小鹏即将发布新一代人形机器人
CyberDaily:
最后车企的都是AI机器人公司
在未来城市里,eVTOL穿梭楼宇上空之间,Robotaxi游历头载送乘客,而人形机器人可能也会在超市、商场或者广场,迎接你......我们构建的未来生活图景已经在晕开了。
小鹏是其中的构建者之一,除了可以上天入地的陆地航母小鹏汇天,还有蛰伏进化的新一代人形机器人。
CyberDaily从小鹏汽车的“10年热爱之夜”发布会上了解到,小鹏汽车董事长何小鹏确认这款集成了十年研发成果的飞行汽车将在今年的第四季度正式开启预售。CyberDaily去年也对这款陆地航母做了分享:小鹏的这两辆飞行汽车,来自未来 。
与此同时,他还宣布将在今年的1024科技日上,发布小鹏第二代人形机器人,其采用了拟人外形设计,基于端到端自动驾驶模型打造。值得一提的是,特斯拉的Optimus Gen2 由FSD自主导航。
小鹏不是首个进入人形机器人领域的厂商,但是对人形机器人长时间研发的智能车企。过去五年从机器狗、机器马、多种机器人产品到人形机器人,小鹏一直在研发一种可以适用各领域的硅基智能生命体,包括智能自动驾驶,本质上无人驾驶汽车,是一个4个轮的机器人,小鹏G9 Robotaxi便是其中一种。
回到小鹏人形机器人,在发布会上,何小鹏并未透露过多新一代人形机器人的信息,除了将采用基于端到端自动驾驶模型,机器手也将超过 60 个关节,意味着灵活性大幅提升。从何小鹏在其微博透露的信息看,这个人形机器人的手可以像人一样自然地精细化操作,比如用手机下单了一辆MONA M03汽车,展现其未来人形机器人生活助理的潜能。
一起回顾下小鹏初代人形机器人PX5
去年,人形机器人作为具身智能的代言人爆发式出现在大众视野,小鹏汽车也在去年的1024科技日上发布了第一代人形机器人PX5。
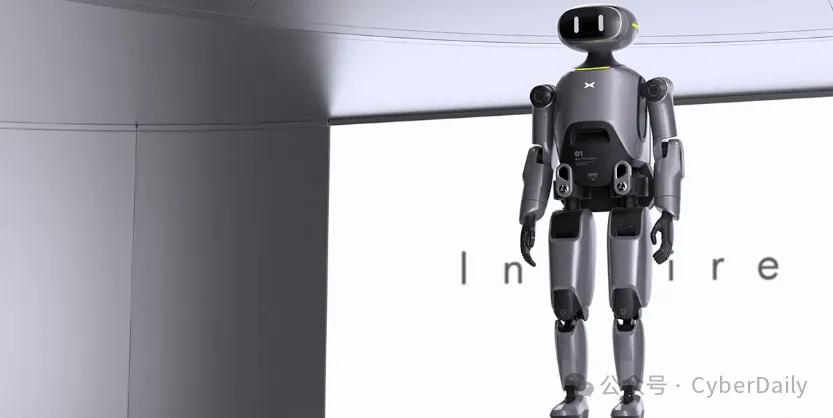
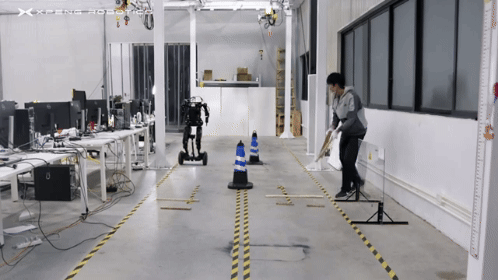
PX5高约1.5米,呈银白色,外观形象可爱。PX5具有耐冲击的特性,即使被踢也能承受冲击并保持稳定。无论地形如何,PX5 都可以执行各种双足行走动作,尤其是直膝行走和大跨步。同样能在草地和岩石地形上机动,可以踢足球、骑小米自平衡滑板车等运动操作。当时透露,PX5人形机器人源于四足机器人技术,而且,何小鹏预计后续迭代的PX5将更大,最终目标是负重行走10公里和不绊倒行走100公里。

我们从其一个测试视频看,PX5同样可以实现轮式移动跨越障碍,因此可以猜测,未来新一代小鹏人形机器人,可能采用模块化设计,可拆卸组装轮式腿或底盘,也可以双足驱动,以适应不同环境和任务执行的需要。
延伸阅读:大胆搞轮式人形机器人,双足先放一边 |CyberRobo
值得一提的是,PX5也是最早参与到英伟达Projec GR00T计划的全球人形机器人之一(下图右一),可以理解为在GR00T训练下,新一代人形机器人或许可以做更多自主任务。当然,我们要等小鹏最新的公布和演示。

可能先用在小鹏汽车的制造厂和直营门店
这不难推测,小鹏人形机器人大概率最先应用在自己的汽车厂实训、运营,采集数据和训练模型,验证整个自动化协作系统等等,同时解决工业制造的劳动力短缺问题,以及减少人们重复性耗体力的工作。双足或轮式都会部署用在不同场景,参考GXO、特斯拉、Figure在宝马车间的应用。双足可能会在装配线,而轮式可能会在零部件仓库里协作。
当然,也会作为新的小鹏汽车门店客服担当、展厅讲解担当,以新的人机交互方式服务客户,引流、导览或咨询、接待(比如倒一杯水给客人)等等业务。
结语
无论双足还是轮式,小鹏新一代人形机器人可能会带来新的、惊叹的体验,不过,我们依然认为,先部署应用,跑通RMF是最为重要,小鹏有太多可应用的场景,从前端到后端,上游到下游,都可能回出现这一代人形机器人的身影,后续发布之后,CyberDaily再进一步分享这一代人形机器人。
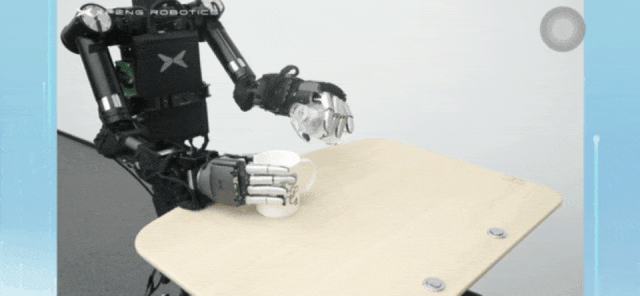
小鹏全新机器手首次亮相!钢铁助理帮何小鹏下单小鹏Mona M03
驱动之家
2024-08-12 10:52发布于河南
快科技8月12日消息,小鹏汽车董事长何小鹏今日发视频称,以后我们不仅仅是在互联网有“嘴替”了,现实生活中也有“手替”了。
何小鹏称,这几天MONA M03预订火爆,他让钢铁助理也体验一下预订流程,流程蛮顺畅。
机器手灵活度高且拥有触觉能力,未来可以在工业场景中处理非常精细的任务,对标了人手的灵活度和触觉能力。
从视频中来看,机器手的手指头可灵活弯曲,指头还能精准触摸手机屏幕进行操控。(视频点此观看)

据悉,小鹏与特斯拉是仅有的能生产人形机器人的车企,去年10月24日的小鹏科技日上,小鹏汽车首次展示了自研的人形机器人。
该机器人身高1.5米,两条腿高度拟人化,能够在碎石子和松软的草皮上行走,甚至能够踢足球和骑平衡车。
何小鹏曾介绍,这款双足人形机器已达到稳定行走的能力,可以完成各类双足行走越障,它可以直膝行走,能大步行走,还具备全地形稳定行走能力。

何小鹏表示,小鹏的AI及大型硬件新进展,将于今年内向大家同步。
免责声明:本内容来自腾讯平台创作者,不代表腾讯新闻或腾讯网的观点和立场。
摘要--
小鹏推出双足智能机器人/方正电机官方表示:公司联合小鹏合作研发小鹏机器人PX5,为其提供相关智能配件!
乖乖隆地咚!方正电机的“人形机器人手臂总成”、“一集成无线传输的扭矩传感器的机器人关节模组”等大量发明专利已卓越超群啊!绝对不要低估了一颗冠军之心!
--世界隐型冠军!方正电机生产的多功能家用缝纫机电机产量稳居全球前茅,全球市场占有率达到85%!
--2024年中国牛市里‘资产重估第一股‘:方正电机!总市值小于28亿投资108亿年产6百万台智驱(超越比亚迪成为世界第一)产值达150亿元!
--浙江方正电机旗下机器人公司又一最新发明专利掀起了其‘人形机器人’的新篇章!
发明专利--


1、一种人形机器人手臂总成
发明专利CN202410914886.4
专利生命周期摘要及附图基本信息权利要求书说明书
专利生命周期
专利申请
2024-07-09
公布
2024-09-24
授权
预估到期
2044-07-09
摘要及附图
专利原文
摘要
本发明涉及一种人形机器人手臂总成,包括第一关节机构、第二关节机构和推拉杆关节机构,第一关节机构包括第一连接支架、关节电机模组以及第二连接支架,第一连接支架包括两个固定盘,两个关节电机模组的输出端分别与两个固定盘固定,第二连接支架包括连接盘和固定环B,固定环B套设固定在一个关机电机模组上,连接盘与第三个关节电机模组的输出端固定;推拉杆关节机构包括关节电机模组、拉杆以及悬吊支架组件,悬吊组件使得两个关节电机模组相互垂直,拉杆的两端分别与两个关节电机模组连接;关节电机模组包括电机、谐波减速器和控制器总成,本发明的总成散热效果好;安装方便,且整个手臂活动更加灵活。
附图

摘要附图
基本信息
| 专利名称 | 一种人形机器人手臂总成 | ||
| 专利类型 | 发明专利 | 注册地区 | 中国大陆 |
| 法律状态 | 审中-发明公开 | 简单法律状态 | 审中 |
| 申请日期 | 2024-07-09 | 申请号 | CN202410914886.4 |
| 公布公告号 | CN118682808A | 公布公告日 | 2024-09-24 |
| 授权公告号 | - | 授权公告日 | - |
| 当前申请(专利权)人 | 浙江方德机器人关节科技有限公司 | 原始专利权人 | - |
| 发明人/设计人 | 牛铭奎、高志川、张鸿、金启前 | 代理机构 | 杭州丰禾专利事务所有限公司 |
| 代理人 | 徐金杰 | ||
| IPC/LOC分类 | B25J17/00 接头 B25J9/12 电的〔4〕 B25J19/02 读出装置〔4〕 B25J19/00 与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置(一般安全装置入F16P;一般防辐射装置入G21F) | ||
| GBC分类 | C3491 工业机器人制造 C3491 工业机器人制造 |
。。。。。。
2、一种集成无线传输的扭矩传感器的机器人关节模组
发明专利CN202410688892.2
专利生命周期摘要及附图基本信息权利要求书说明书
专利生命周期
专利申请
2024-05-30
公布
2024-10-15
授权
预估到期
2044-05-30
摘要及附图
专利原文
摘要
本发明涉及一种集成无线传输的扭矩传感器的机器人关节模组,包括中间固定轴以及依次连接传动的电机模块、减速器模块、扭矩传感器模块,电机模块的一端设有控制器线路板,且控制器线路板的外侧还固定有保护盖,中间固定轴贯穿电机模块和减速器模块,且一端与保护盖固定,另一端固定有第一电路板组件,第一电路板组件上的线路通过中间固定轴的过线孔连接至控制器线路板,扭矩传感器模块上固定有第二电路板组件,第二电路板组件与第一电路板组件之间通过无线收发模块进行数据传输,且通过磁耦合形成无线供电。本发明的结构主要应用于机器人手臂关节,解决了传统的有线扭矩传感器线路缠绕易损的问题,大大提高了关节模组整体的使用寿命。
附图

摘要附图
基本信息
| 专利名称 | 一种集成无线传输的扭矩传感器的机器人关节模组 | ||
| 专利类型 | 发明专利 | 注册地区 | 中国大陆 |
| 法律状态 | 审中-发明公开 | 简单法律状态 | 审中 |
| 申请日期 | 2024-05-30 | 申请号 | CN202410688892.2 |
| 公布公告号 | CN118769292A | 公布公告日 | 2024-10-15 |
| 授权公告号 | - | 授权公告日 | - |
| 当前申请(专利权)人 | 浙江方德机器人关节科技有限公司 | 原始专利权人 | - |
| 发明人/设计人 | 高志川、张鸿、俞斌全、顾瑜芯 | 代理机构 | 杭州丰禾专利事务所有限公司 |
| 代理人 | 徐金杰 | ||
| IPC/LOC分类 | B25J17/00 接头 B25J9/00 程序控制机械手 B25J9/10 以机械手元件定位装置为特征的〔4〕 B25J9/12 电的〔4〕 B25J13/08 通过读出装置,例如观察或触摸装置〔4〕 | ||
| GBC分类 | C3491 工业机器人制造 C3491 工业机器人制造 |
权利要求书
1.一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:包括中间固定轴(4)以及依次连接传动的电机模块(1)、减速器模块(2)、扭矩传感器模块(3),所述电机模块(1)的一端设有控制器线路板(16),且控制器线路板(16)的外侧还固定有保护盖(17),所述中间固定轴(4)贯穿电机模块(1)和减速器模块(2),且一端与保护盖(17)固定,另一端固定有第一电路板组件,第一电路板组件上的线路通过中间固定轴(4)的过线孔(41)连接至控制器线路板(16),所述扭矩传感器模块(3)上固定有第二电路板组件,第二电路板组件与第一电路板组件之间通过无线收发模块进行数据传输,且第一电路板与第二电路板之间通过磁耦合形成无线供电。
2.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述第一电路板包括第一支架(35)以及固定在第一支架(35)的两侧的线路板A(36)和线路板B(37),第一支架(35)固定套设在中间固定轴(4)端部,线路板A(36)与线路板B(37)电连接;所述第二电路板包括第二支架(32)以及固定在第二支架(32)的两侧的线路板C(33)和线路板D(34),第二支架(32)固定在扭矩传感器模块(3)内,线路板C(33)与线路板D(34)电连接,所述线路板D(34)、线路板A(36)上分别设有线圈,通过磁耦合使得线路板A(36)对线路板D(34)无线供电。
3.根据权利要求2所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述扭矩传感器模块(3)包括壳体C(31),所述壳体C(31)的外壁上设有应变片,所述应变片与第二电路板组件电连接。
4.根据权利要求3所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述应变片为四组,四组应变片等距间隔设置,每组为两片,所述壳体C(31)上还设有凹槽,所述应变片成45斜贴在凹槽内。
5.根据权利要求3所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述应变片与线路板C(33)通过导线连接,四组应变片组成一个惠斯通全桥电路。
6.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述扭矩传感器模块(3)上还固定有永磁体,所述第一电路板组件上还设有与永磁体相配合的磁传感器。
7.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述电机模块(1)包括壳体A(11)、定子(12)、转子铁芯(13)和转轴(14),所述定子(12)固定在壳体A(11)内,所述转子铁芯(13)固定在转轴(14)上,所述壳体A(11)的一端还固定有前端盖(15),所述转轴(14)为空心轴,两端分别与壳体A(11)和前端盖(15)转动连接,所述中间固定轴(4)穿设在转轴(14)中,且与转轴(14)之间设有支撑轴瓦(42)。
8.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述减速器模块(2)为谐波减速器模块或行星齿轮减速器模块。
9.根据权利要求7所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述减速器模块包括输入凸轮(21)、柔轮(22)、壳体B(23)和输出轮(24),所述输入凸轮(21)中部设有供中间固定轴(4)穿过的通孔,所述输入凸轮(21)与转轴(14)固定,所述柔轮(22)通过轴承设置在输入凸轮(21)外,且柔轮(22)的一端与壳体B(23)固定,所述输出轮(24)通过轴承设置在壳体B(23)内,且由柔轮(22)传动。
10.根据权利要求1所述的一种集成无线传输的扭矩传感器的机器人关节模组,其特征在于:所述保护盖(17)与壳体A(11)的一端固定,且保护盖(17)与壳体A(11)的端面形成安装控制器线路板(16)的保护腔。
本文作者可以追加内容哦 !

