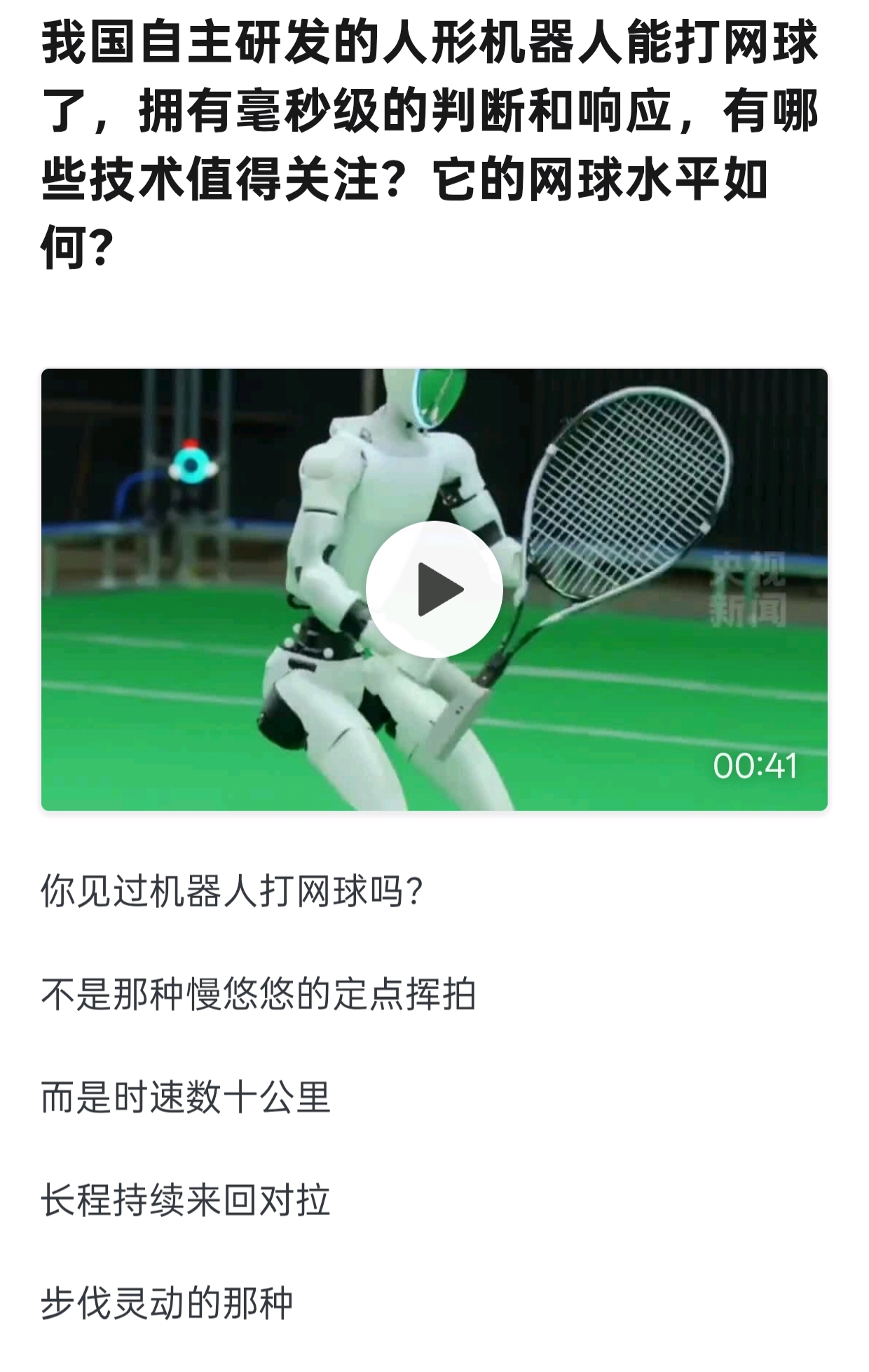
$中坚科技(SZ002779)$ 机器人的全身平衡控制这块其实已经解决了,pipeline已经跑通,已经没有门槛了,主要就是调试要花时间,就不多说了。这个打网球的任务的难点是机器人如何及时的追踪网球的位置并把球给回过去。 对于这些难点,从这个视频里来看,研究者是做了一些简化处理。
首先,对网球的追踪定位,看上去并不是仅仅以来机器人的本体感知,从周边的设备以及人类头上绑的定位球来看,应该是用了动捕的系统来做网球的定位; 其次,回球方面,球拍是固定在机器人手臂末端的,消除了操作的难题,加上人类喂球喂得比较好,基本上只要网球定位偏差不大,固定的挥拍轨迹就能把球回过去。还有一个小点,不知道是不是机器人尺寸比较小,从比例上来看网球拍有点偏大。 总之,这个demo还是挺酷炫的,创新点偏向于一个综合的系统设计以及工程集成能力,然后落地到一个大众能看懂的任务中,取得了比较好的传播效果。但拆开来,也并没有什么新东西。 排除上述对通用场景打网球问题的简化操作,单独一个人形机器人依靠本体能力来打网球还是有比较远的距离的。不过这个task我还是挺喜欢的,比简单的翻跟头还是要复杂不少,而且有落地价值。
转
追加内容
本文作者可以追加内容哦 !

