今天分享的是【车载智能计算基础平台参考架构2.0白皮书】 报告出品方:中国汽车工业协会
精选报告来源:全球行业报告圈
| 参考架构2.0总体框架
(1)车载智能计算基础平台实现的主要目标包括:支持异构多核高算力与冗余的硬件架构、SOA软件架构、车内高带宽主干通信网络及多种网络协议、OTA升级等;满足高实时、多级功能安全需求,网络安全与数据安全要求;实现软硬件的平台化、标准化,构建软硬件一体化技术体系;促进智能网联汽车的创新化、生态化发展。
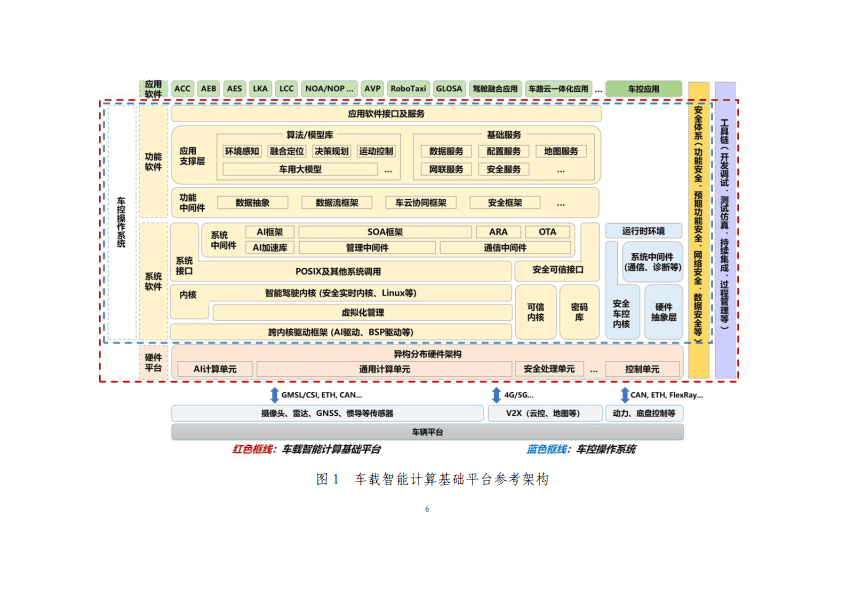
(2)车控操作系统采用纵向分层(包含系统软件和功能软件)、横向分区(包括安全车控操作系统、智能驾驶操作系统)式架构,支撑智能网联汽车驾驶自动化功能实现和安全可靠运行。
| 参考架构2.0的特点
>安全融合。从车载智能计算基础平台整体角度考虑安全体系建设,将功能安全、预期功能安全、网络安全、数据安全、OTA安全有机融入到产品的设计、开发、生产、运维、报废的全过程中。采用软硬件结合的安全技术,打造全栈内生安全体系,提升安全策略的通用性和灵活度,同时兼顾产品的性能和成本。
>AI大模型融合。探索和发挥AI大模型在智能驾驶系统感知、理解和决策能力等方面的提升作用,研究和把握多模态整合、多模型合并、端到端、轻量化演进等创新态势,加强AI大模型训练、推理与车载智能计算基础平台研发、应用等环节的融合,重点在数据闭环、自动标注、场景构建等云端环节使用大模型提高效率、降低成本,在智能驾驶、智能座舱等车端环节使用大模型提供更丰富、适用的应用服务。
| 参考架构2.0的重点创新研究方向
>操作系统内核。研究面向多核环境的新型内核架构、实时调度、高性能IPC(进程间通信)/RPC(远程过程调用)、内存管理、安全编程语言、内核安全模型等技术。研究高安全、强实时的微内核、单内核、多内核架构设计,实现安全实时操作系统和虚拟化管理。研究兼容Linux服务接口的操作系统内核,继承Linux生态。
>安全保障技术。研究可靠冗余设计、多层多样化监测方案、失效可运行或失效降级安全模式、场景库构建与测试评估等安全技术,降低平台随机性失效或系统性失效带来的功能安全风险。研究安全可信环境构建、纵深防御体系、网络安全监测、基于内生安全的弹性工程等防御技术,从识别风险和漏洞、安全防护、安全检测、安全响应以及快速恢复等方面综合保障网络安全。研究构建面向数据采集、传输、存储、处理、提供、公开、删除和销毁全生命周期的数据安全技术体系。
| AI计算单元
AI计算单元负责图像处理、深度学习推理等数据密集型计算。架构方面,FPGA、DSP、GPU、NPU、TPU等专用加速器等引入到AI计算单元中,并负责不同的计算任务。性能方面,随着数据量的增加、复杂模型的推理和部署、实时性要求的提高以及AI应用领域的丰富,对AI计算单元的算力需求持续增长,需要通过芯片制程升级以及内存访问、数据传输、电源管理、时钟管理、电路设计的优化提升AI计算单元的能效。同时,运用更灵活的任务划分和卸载机制、动态任务调度和资源管理等技术,实现通用计算单元与AI计算单元的协同,进一步提高处理效率。通信方面,高速串行计算机扩展总线(PCIE)、计算快速链路(CXL)、英伟达高速GPU互连技术(NVLink)、高带宽内存、片上网络(NoC)优化等高速互联技术加快普及应用,奠定车载智能计算的基础。模型和算子方面,AI计算单元通过通用处理器和专用加速器实现对模型和算子的支持。除了增加定点计算的比重,AI计算单元还为矩阵计算、卷积计算、时序计算等算子以及更复杂的Transformer模型等不同任务量身设计计算模组,以模块化方式提升性能、降耗。
| 通用计算单元
通用计算单元负责处理通用计算任务。随着智能驾驶业务和算法模型的发展,对通用算力的需求也急剧增长。通用计算单元由多个车规级多核CPU组成,各单核主频高、计算能力强。通用嵌入式CPU通常采用ARM架构,近年来业界也在尝试基于RISCV架构进行设计。在实际应用中,需要针对具体任务进行优化和并行化,以充分利用多核CPU的算力。
(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:全球行业报告圈
本文作者可以追加内容哦 !

