前不久,Figure 02这个号称地球上最先进的人形机器人发布,手指首次配备触觉传感器,展现出了精准作业能力。而特斯拉的“擎天柱”二代人形机器人,手指也搭载触觉传感器,能完成抓鸡蛋等精细动作,并通过海量数据收集结合视觉+触觉的端到端神经网络训练方案,让擎天柱可以实现快速作业技能学习满足未来特斯拉超级工厂柔性作业。
触觉正成为人形机器人企业角逐的核心能力,产业界和学术界纷纷在材料选择、加工工艺等方面进行突破创新。预示着人形机器人感知领域正开启一个全新的发展阶段。
在这种趋势和需求下,帕西尼感知科技(深圳)有限公司(下文简称“帕西尼)在本次WRC现场最新推出基于自研ITPU(Intelligent Tactile Processing Unit,多维触觉处理单元)技术的第二代多维触觉人形机器人TORA-ONE将为国内外人形机器人从触觉感知向触觉智能进化带来前瞻性的变革。
展会上,帕西尼不仅带来了其标杆性的第二代多维触觉人形机器人TORA-ONE,还推出了第二代多维触觉灵巧手DexH13以及基于ITPU(Intelligent Tactile Processing Unit,多维触觉处理单元)技术的多维度触觉传感器PX-6AX GEN2,展现出帕西尼从多维度触觉传感器到多维触觉灵巧手和人形机器人产品全线布局与量产能力,为行业提供更加广泛且全面的多维触觉解决方案。
据了解,帕西尼已成功搭建了“传感器核心零部件”到“人形机器人整机制造”的全链路环节,叠加全场景触觉数字化服务的多元化业务结构,为机器人提供先进的触觉感知能力。作为最懂人形机器人的触觉传感器公司,可以说帕西尼有望通过自研的多系列触觉产品,引领着整个机器人行业迈向一个技术革新与感知能力飞跃的新纪元。
精准力控,全面感知
现场可以看到,帕西尼重磅发布的第二代多维触觉人形机器人TORA-ONE,这是业界首款多维触觉人形机器人。TORA-ONE 拥有全身 47 个自由度,具备高度灵活性,特别是其 4 指仿生灵巧手的设计,不仅具备高自由度,还能精准模拟人类的复杂手部动作。其双手内搭载近两千个帕西尼自主研发生产的 ITPU多维触觉传感单元,拥有0.01N的精准力控能力,在HAPTA异构多核阵列软硬件架构下TORA-ONE双手拥有精细灵敏的全面感知能力,能实现物体6D位姿识别与柔性抓取。


在工厂生产制造中,人形机器人需要识别和抓取不熟悉的物体,并施加适当压力以防止打滑,而触觉传感器能够使机器人更精确地感知外部环境,包括工件的形状、质地、硬度等,从而实现对物体的更精细操作。通过触觉,机器人可以更好地适应不同的工作环境和任务需求。
另一方面,在生活服务场景落地,机器人与人类之间的交互需要更加自然和直观。例如,在医疗护理或手术行业中,要求机器人需具备媲美人类的感知能力,要求触觉、视觉、听觉等多模态感知系统融合,实现对环境更全面、更深入的理解,这种多模态感知融合的能力也将大大提升机器人的智能水平和应对复杂任务的能力。
基于先进的帕西尼视触觉多模态感知模型 VTLA-Model与 PX-Core 控制核心,帕西尼第二代多维触觉人形机器人TORA-ONE具备先进的运动控制和人机交互功能,能够高效学习人类生产作业技能,并快速适应不同的环境和任务。而且值得关注的是,不仅仅是触觉,TORA-ONE 整机拥有超高的47个自由度,灵活度极其高,同时,得益于轮式底盘和躯干采用高度模块化结构设计,腰部结构可自如地折叠伸展,使其具备动态化自适应身高,腰部折叠态1.46m,伸展态达1.86m,根据不同的场景使用需求可以实现功能的灵活配置与场景的精准适配,满足多种高度空间作业所需,可以广泛应用于工业制造、精密制造、医疗康养、仓储物流等多种场景。

超强应用,一“触”即发
除了机器人本体,灵巧手也是人形机器人普遍正在快速加入的关键部件。触觉灵巧手则在普通灵巧手的基础上更进一步,通过内置的ITPU触觉传感器能够模拟人手的精细操作,感知物体的大小、形状、纹理等物理特性,从而实现对物体的精确抓取、操作和放置。
本次WRC,帕西尼还带来了多维触觉灵巧手DexH13 GEN2,多维触觉灵巧手DexH13是一款搭载专业级机器人 ITPU 触觉传感单元及 AI 视觉技术与科技美学于一体的产品。其基于领先的AI手眼相机零样本位姿估计AI视觉算法,DexH13 具备如人类般细腻灵敏的触觉感知能力与视觉位姿估计能力,灵巧手也领先业界拥有了卓越的AI视觉物体位姿估计能力。
同时,借助单手近千个ITPU 多维触觉传感单元和人工智能算法,DexH13 能够实现0.05mm 高精度定位,0.01N 精准力控能力,最大负载能力可达 5kg,这也代表着灵巧手具备工业级作业能力。

仔细观察可以发现,DexH13灵巧手的指尖,采取多关节、多自由度设计,高度仿生还原人手动作模态,赋予其出色的运动能力,从而完美模拟人手的抓取、旋转、拿捏等各项复杂动作,这将为先进制造、精密装配、医疗康养、教育科研等多个领域带来了前所未有的便利与效率提升。
搭载DexH13 GEN2触觉灵巧手,人形机器人不仅将提高操作的精度和稳定性,还能增强人机交互的自然性和安全性,同时推动相关学科的研究和技术创新。例如在人机交互领域,搭载帕西尼触觉灵巧手能够模拟真实的手感体验,使人与机器人之间的互动更加自然和直观。例如在虚拟现实(VR)和增强现实(AR)应用中,触觉反馈可以让用户感受到虚拟物体的存在和特性,增强沉浸感和互动性。
传感底层,实力尽显
本次展会上,帕西尼感知科技还带来了基于三款不同专业级机器人 ITPU 触觉传感单元打造的不同类型传感器(专业级机器人触觉传感器PX-6AX GEN1,PX-6AX GEN2,消费触觉传感单元PX- 3AX)。触觉传感器是机器人直接感知环境作用的重要传感器,在触觉传感器内部,帕西尼ITPU多维度触觉传感单元是其中最为关键的单元。
帕西尼自主研发生产的多维度触觉传感技术,由HAPTA 异构多核阵列软硬件架构实现,其下集成ITPU多维触觉传感单元(Intelligent Tactile Processing Unit)和触觉算法,从而能全面支撑ITPU在复杂的泛用场景下,进行毫秒级决策和高层级感知,为机器人用户提供易用且丰富的触觉信息。在本次展会上帕西尼所带来的PX-6AX GEN2新品融合前沿ITPU多维触觉技术,在PX-6AX GEN1基础上更新采用第二代芯片设计与封装,整体尺寸更轻薄的同时信号传输密度大幅提升,为机器人提供易用且丰富的触觉信息,进行秒级决策和高层级感知。



在感知性能上,PX-6AX GEN2也有着全方位提升。PX-6AX GEN2可在1000Hz采样频率的超高分辨力下测量法向力、摩擦力、分布力、力矩、材质、温度、滑动、回弹等15种触觉信息,全量程内可保证0.01N高精度,为机器人提供业内领先的传感性能。
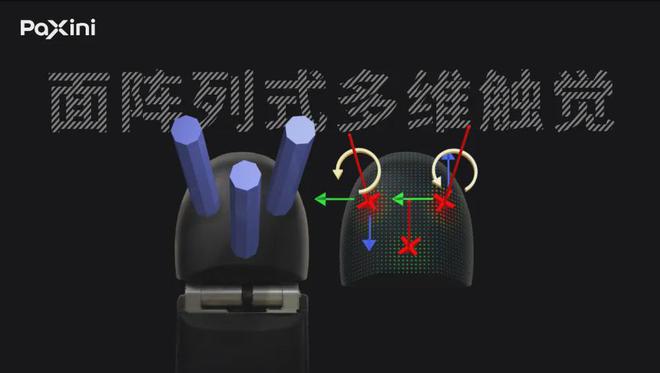
ITPU多维度触觉传感单元能使机器人感知物体的硬度、粗糙度、形状等多维信息,更好理解周围环境中的物体特征,这是实现精准操作物体和执行复杂任务的基础。因为在复杂环境中,视觉系统常受到低光照、模糊、镜头污染和不可见因素影响,而帕西尼ITPU多维度触觉传感技术可确保机器人在这些影响下依然能够发挥作用,极大增强了机器人在复杂环境下的可靠性和适应能力。
据悉,本次WRC展会上,帕西尼所展示的专业级机器人ITPU触觉传感单元已经开启产品预售通道,首次为行业客户开放多种预售权益,以此助力机器人行业多维度触觉升级,更多的预售详细信息,可前往帕西尼展台获取或关注帕西尼公众号了解产品更多预售信息。
结语与未来
机器人已经在工业和自动化等结构化场景中获得高度认可。随着智能化程度的迅速提升,人们无不期待机器人加速走进人们的生活和工作。然而,要让机器人适应复杂多变的生活场景并不简单,组装纤细的产品,拾取柔软的布料,端起易碎的玻璃杯,甚至搬运大小重量不一的箱子都是机器人作业的阻碍。人类克服这一困难的利器是布满双手的触觉感受器,借由多维度阵列式的触觉反馈,人类可以在行动过程中不断地调整姿势和力度,实现对各类物体和工具的操控,因而,触觉感受能力是机器人进入复杂柔性场景的关键。
可以发现,如今帕西尼已经突破机器人多维度触觉底层核心技术,产品体系包括触觉传感器、灵巧手、机器人等,这使得帕西尼既能够作为专业的触觉人形机器人企业提供整机产品,也能够为企业提供配套的核心触觉传感器零部件,这已经形成了成熟的产业链闭环,帕西尼也将成为全球领先的多维度触觉传感器提供商与人形机器人领导者。
本文作者可以追加内容哦 !

