无论是人形机器人还是复合机器人,真正要去替代人,应该先从人类最不愿意进行的工作开始。而这些任务,往往复杂度更高,对机器人能力要求更多。例如灾难救援、在轨维护、空间装配任务等极端条件下,不仅需要机器人能够处理复杂的障碍和重物,还需要其能够像人类一样使用双臂协同协调进行混合任务作业,这对于单臂机器人来说难以胜任。因此,研究如何实现双臂机器人系统的协调控制,以适应不同约束条件下的任务需求,具有重要的理论和实际意义。
近日,International Journal of Robust and Nonlinear Control上一篇名为《Model-free event-triggered distributed coordination control for dual-arm reconfigurable manipulators with unknown object constraints》的论文吸引了国际上不少人的目光。该研究提出了一种面向未知工具约束的双臂可重构机器人无模型事件触发分布式协调控制方法,并采用中科深谷的实时仿真控制系统以及三轴机械臂进行了实际协作抓取可行性验证。实验结果最终实现了针对具有未知工具约束的双臂可重构机器人系统,借助这种新方法,未来有望应用于人形机器人以及双臂协作机器人等模态的异构任务处理。

真实产品支持研究高效验证
双臂相对于单臂无疑能发挥更大的作用,人们常见的人形机器人其实上半身是一个复杂的双臂系统,大多由多个机械臂连杆及关节串联组成,各部件之间存在复杂的力学耦合关系,从任务层的角度而言,双臂机器人需要在工业生产中搬运大型物体的操作任务,执行医疗中的手术等任务,在装配线上,两个机器人需要协调工作来完成零部件的安装。在实际应用中,抓取工具的多样性和可重构机器人模型的不确定性是完成在无人直接操作的复杂环境中双臂协调搬运任务的主要难点。
这种复杂性需要通过建立动力学模型来深入理解其运动特性和相互作用,并对两个机器人系统进行同步控制,从而更加精确模拟人的两只手臂运动,才能向类人化操作迈出更加重要的一步。而这通常涉及机械臂运动规划、力控制、路径跟踪等技术,协调控制还需要考虑双臂之间的相互影响,以及外界环境的干扰。
本论文研究的双臂可重构机器人是中科深谷由相同接口模块组成的机器人,能通过移除或添加模块改变自身构形从而适应不同的任务需求,特别适合在极端环境下完成多任务。长春工业大学智能机械与机器人创新团队结合课题组的研究方向以及中科深谷实验平台等方面,确定了研究的主体和目标,在前期通过对理论的分析和研究,最后为了模仿真实应用场景验证所提出的协调控制方法有效性,采用了已经在工业、医疗等任务中经过实际验证并将其完善为研究套件的中科深谷产品,该产品在实验中表现出了高度可靠性以及研究适配性,是科研验证的有力选择。
由于双臂是以单臂为基础,是单臂任务的扩展,研究双臂机器人应用工具后的特性和模态,才能有助于双臂机器人在更广泛的应用领域中发挥出更大作用。该论文首先基于牛顿-欧拉算法和运动学分析,分别建立了双臂机器人和抓取工具的动力学模型,并根据载荷分配方法,将运动力有效地分配到各个机器人上,然后得到了单臂机器人完成搬运任务的动力学模型,以描述被控对象的运动和驱动单元输入力或力矩之间的关系。
其次,研究采取了基于梯度模型的自适应工具质心位置估计算法,尝试改进融合状态变量函数。梯度模型通过计算目标函数关于参数的梯度,能够逐步逼近最优解。在双臂机器人中,这种算法可以精确估计工具质心的位置,减少因位置估计不准确而导致的误差,实现双臂协调控制,从而达到实时反映位置和内力的跟踪性能的功能,最终能够提高双臂协同定位精度与稳定性、优化运动规划与控制、增强适应性与鲁棒性。
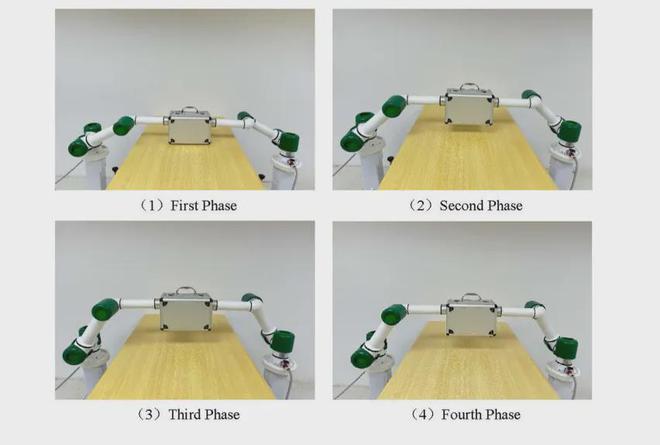
随后,研究又利用李雅普诺夫稳定性理论证明了双臂可重构机器人系统的一致最终有界稳定性,最后通过中科深谷的两台3自由度机器人进行实验,验证了所提出的协调控制方法的有效性。
开源产品加快研发进程
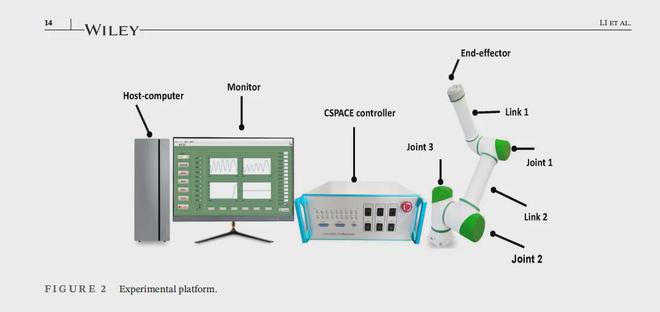
中科深谷的三轴机械臂及实时仿真控制系统对于该项研究起到了重要作用。在该研究中,长春工业大学智能机械与机器人创新团队基于两个中科深谷三自由度机器人实验平台搭建,首先对夹持工具的期望轨迹进行设计,以夹持工具上下不均匀运动作为实验目标,控制则在中科深谷的三自由度机器人实验平台上实现。作为一个专为科研和教学设计的多功能机器人系统,中科深谷三轴机械臂具有高精度和灵活性,适用于多种实验和教育场景,在该科研中加速了研究进展。
在搭建过程中,中科深谷开源的实验设备很好助力了科学研究。该套设备不仅有强大的硬件设备支持,而且有完全开放的底层数据和程序,长春工业大学智能机械与机器人创新团队首先基于中科深谷三自由度机器人进行动力学模型的识别和估计,分别搭建了自适应观测器和神经网络观测器。然后,在此基础上对两个机器人进行协调控制器的搭建,在搭建过程时对程序和参数进行多次修改达到期望的效果。

其次,长春工业大学智能机械与机器人创新团队在设计时还考虑了不变间隔事件触发机制和时变间隔事件触发机制,基于中科深谷三自由度机器人测试和比较事件触发机制下协调控制的作用和影响。其搭建所设计的联合系统跟踪性能,估计误差等反映系统工作状态的事件触发条件,在保证系统稳定的同时,适当放缩触发条件,对比触发前后的系统性能和能耗情况。
该研究还发现,如何在不确定甚至是未知的模型信息情况下,对双臂可重构机器人甚至是多个可重构机器人进行精准的控制难度非常高。另外,可重构机器人一般工作在极端复杂的环境更能发挥其结构特点,如何在资源受限的情况下,在不折损控制精度的同时节约能耗这是另一难点问题。
得益于中科深谷产品的高精度和可靠性,实验结果还表明,在事件触发条件下,双臂机器人系统的无模型控制器更新次数是时间触发条件下的一半,同时保证了整个操作过程的跟踪控制精度。事件触发机制是一种控制策略,它根据系统的实际状态与预设条件来决定是否进行控制操作,可以判断系统的收敛速度和稳定性。基于中科深谷三自由度机器人,该实验通过大量的实验和测试,最终得出了所提出算法的有效性,证明了机器人实时系统的稳定性。
中科深谷产品机器人系统性能上不仅有着控制精度和稳定性的优势,还有着效率和响应速度,尤其在多重约束下的协调控制和交互控制上,该系统也具备极高的响应能力,不仅能助力科研研究,在需要精确操作的任务中,如精密装配、精细加工等,也能够显著提高任务执行效率,提升任务的成功率。

结论与未来
当前,随着人形机器人等新产品进入更多场景,对于机器人可重构特性提出了越来越多的要求。尤其在制造业、服务业、医疗领域等具有高度灵活性的场景中,需要一种可以根据任务或环境的变化而改变构形的机器人。
近年来,可重构机器人在模块化机器人基础上快速发展延伸,该类机器人可以利用一些不同尺寸和性能的可互换的连杆和模块,根据工作环境和任务装配成不同构形。这种组合并不是简单的机械装配,参与重构机器人的各模块本身就是一种集通信、控制、驱动、传动为一体的单元,重构后的机器人将能适应新的工作环境和工作任务。例如,一个可重构机器人可以在不同的生产线任务之间切换,或者在医疗手术中调整其形态以适应不同的手术需求。
正是这样的结构特点,给可重构机器人的控制器设计带来了新的问题和难点。需要考虑加入末端工具,或者通过对模块进行组合,能够简单快速地装配成适合不同任务的几何构型。但重构后的机器人还需要不但能适应新的工作环境和工作任务,并具有很好的柔性,能够根据环境和任务优化自身的结构,快速、有效地地完成任务。
长春工业大学智能机械与机器人创新团队的研究,最终针对受未知工具约束单个可重构机器人,提出了一种基于局部数据的分布式无模型协调控制器,同时基于中科深谷三轴机械臂,控制器实现了一个通用的多臂机器人协作任务框架,能解决面对不同构形的机器人协作控制任务。

此外,针对双臂可重构机器人,团队还提出了基于协调控制器的非周期更新条件。设计的触发条件可以通过评价工具的运动状态、质心的估计、内力的稳定性以及补偿模型的准确性来调整触发时间。不仅保证了实时系统的稳定性,而且节约了极端环境下有限的通信资源。
这项可重构机器人的研究为未来特种机器人与人形机器人应用开发提供了新的思路,在军事、航天、核工业等领域也具有重大的意义,期待未来看到这项研究未来的应用落地。
本文作者可以追加内容哦 !

