
2024年中关村仿生机器人大赛包含四大赛道,诚邀国内外仿生机器人相关企业、高校、科研院所和创新团队踊跃报名。本文聚焦具身大模型这一赛道,深度剖析其赛程安排、竞赛规则及参赛要点。
光影交错间,科幻电影中的愿景正逐步融入现实。从《机器管家》中机器人安德鲁的情感觉醒,到《Her》中智能系统萨曼莎的情感陪伴,人机共融的愿景已不再遥不可及。随着AI大模型的快速发展,具身智能——这一曾停留于科幻的概念,正加速从理论迈向实践。
近期,具身智能方向取得了诸多进展。从谷歌的RT-H到OpenAI、Figure 联合打造的Figure01,机器人的交互性、通用性越来越受到研究人员的关注。在2024年世界人工智能大会上,具身智能成为焦点,展现了从灵活机器人到生活助手,再到情感交互系统的多样应用,极大地拉近了人与科技的距离。
业界视具身智能为通往通用人工智能的关键路径,它让AI通过物理实体与现实世界互动,开启了AI技术的新篇章。这一转变正深刻影响着产业结构与工作模式,具身智能在工业生产、医疗健康、服务等多个领域展现出巨大潜力。
为贯彻落实《“十四五”机器人产业发展规划》、《“机器人+”应用行动实施方案》重点任务部署,有效推动海内外机器人领域高层次人才、创新团队集聚,助力打造机器人行业人才和产业发展新高地,由北京市多个重要部门联合指导,中关村科学城管理委员会主办,中国软件评测中心承办的「2024年中关村仿生机器人大赛」重磅启动,此次大赛旨在搭建一个交流创新思想、展现创新成果、孵化创新项目、探索创新发展路径的新平台,欢迎国内外高校、科研机构和企业等优秀团队积极踊跃参赛。
具身大模型赛道规则详解
通过深度研读2024年中关村仿生机器人大赛规则,机器人大讲堂认为具身大模型赛道是一项旨在测试人工智能机器人在实际应用场景中的能力的比赛。本赛道分为两个主要赛项:工业场景任务赛和家庭场景任务赛。这两个赛项独立进行,参赛队可以选择参加其中一个或多个赛项。比赛的目的是评估机器人在不同环境下执行各种任务的能力,包括语音交互、物体识别、精确操作等方面。
工业场景任务赛要求机器人完成四项指定任务:搬运、分拣、扫码和贴标签。这些任务模拟了工业环境中常见的操作,考验机器人的精确度和多样化能力。比赛场地总体尺寸为长5米、宽3米,设有起始区和各个任务区。起始区是一个半径为0.5米的圆形区域,位于场地中心线上,距离任务区垂直距离1.5米。
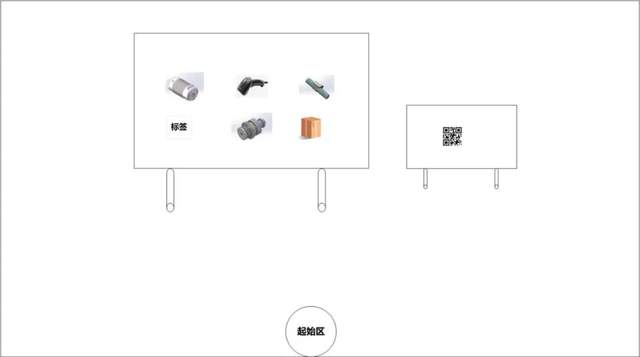
工业场景任务赛场地示意图
搬运任务要求机器人将桌面A上的箱子搬到桌面B上。任务环境包括桌子、托盘、各种模型(如电机、丝杠、减速器)、扫码枪、标签和箱子。箱子尺寸为300mm×300mm×300mm,重量5kg。分拣任务则要求机器人从桌面A上分拣出指定的物品并放到指定托盘中。扫码任务需要机器人从桌面A上抓取扫描枪,用它扫描桌面B上的二维码并读取信息。贴标签任务要求机器人将桌面A上的标签粘贴到特定的贴标签区域。
家庭场景任务赛模拟了日常生活中的三个常见任务:冰箱取物、折叠衣服和垃圾清理。比赛场地总体尺寸为长10米、宽6米,包括三个任务区域,每个区域尺寸为3米×2米,区域之间间隔0.5米。起始区与任务区之间的垂直距离为3.5米。
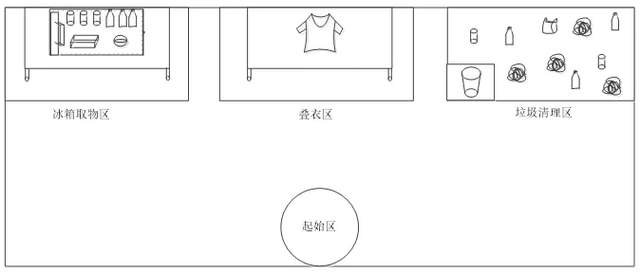
家庭场景任务赛场地示意图
冰箱取物任务要求机器人从冰箱中取出指定的物品。冰箱内放置有各种物品,如罐装饮料、瓶装矿泉水、面包和水果。机器人需要进行三次物品抓取,每次冰箱内物品的摆放位置都会有所不同。折叠衣服任务要求机器人将平铺在桌面上的T恤折叠成指定状态,折叠后的衣服应呈现正方形或长方形。垃圾清理任务则要求机器人在垃圾清理区拾取垃圾并将其放入垃圾桶。机器人需要进行三次垃圾清理,每次垃圾桶和垃圾的摆放位置都会有所变化。
两个赛项的评分标准都包括任务分和时间分。任务分根据完成任务的质量和数量来评定,而时间分则根据完成任务的用时排名来确定。每项任务的最长比赛时间为10分钟,如果超时未完成任务则视为无成绩。
在工业场景任务赛中,搬运和扫码任务各值50分。分拣任务的得分根据正确分拣的物品数量而定:正确分拣出3个物品得50分,2个物品得30分,1个物品得10分。贴标签任务也有类似的评分标准:标签完全贴到指定区域得50分,2/3部分贴到得30分,1/3部分贴到得10分。
家庭场景任务赛的评分标准类似。冰箱取物任务中,正确取出3种物品得50分,2种得30分,1种得10分。折叠衣服任务中,如果叠好后的衣服状态为正方形或长方形得50分,基本为正方形或长方形得30分。垃圾清理任务的得分取决于清理的准确率:90%以上得50分,80%以上得30分,70%以上得10分。
两个赛项的时间分计算方式相同:根据用时排名,前十名分别获得10到1分的时间分,第十一名及之后为0分。未完成任务的队伍时间分也为0分。每个赛项的总成绩为任务分与时间分的总和。
比赛要求机器人采用全自主方式完成指定任务,并通过语音指令来启动任务。这种设计旨在测试机器人的自主性、语音交互能力以及完成复杂任务的能力。参赛队需要开发能够理解语音指令、规划路径、识别物体、执行精确操作的智能系统。
具身大模型赛道的设计体现了对人工智能机器人在实际应用中的全面测试。工业场景任务赛侧重于测试机器人在工业环境中的精确操作和多任务处理能力,而家庭场景任务赛则关注在日常生活中的应用,考验机器人的适应性和灵活性。通过这些任务,可以全面评估参赛队开发的人工智能系统在感知、决策、执行等方面的能力。
比赛的难点在于机器人需要在有限时间内完成多样化的任务,这要求参赛队开发的系统具有快速适应环境变化的能力。例如,在家庭场景任务赛中,冰箱内物品的摆放位置和垃圾的分布情况每次都会改变,这就要求机器人具有强大的环境感知和物体识别能力。同时,语音交互的要求也增加了比赛的难度,机器人需要准确理解并执行语音指令。
总的来说,具身大模型赛道为参赛队提供了一个展示和测试其具身大模型技术的平台。通过模拟实际应用场景,比赛不仅考验了参赛队的技术水平,也为具身大模型在工业和家庭领域的应用提供了有价值的参考。这种比赛形式有助于推动具身大模型技术向更实用、更智能的方向发展,为未来智能机器人在各种复杂环境中的应用铺平道路。
大赛背景
大赛以“竞技仿生 创新未来”为主题,将汇集全球顶尖的仿生机器人企业、高校、科研院所以及各创新团队,聚焦机器人领域全球前沿态势,共同竞技、展示和交流仿生机器人的最新技术和成果,致力于打造国际国内基础科技含量最高、学科跨度最广、产业引领性最强的仿生机器人竞赛。
赛道方面,共设置人形仿生机器人、多足仿生机器人、具身大模型以及其他仿生机器人(包括但不限于水下仿生机器人、飞行仿生机器人、爬行仿生机器人、软体仿生机器人、仿生灵巧手等)四个赛道。

赛程方面,大赛设三轮遴选,初赛由专家评委进行基本情况审查,复赛为现场答辩及参赛机器人基本技能演示,决赛依据比赛规则进行现场竞技。

专家委员会方面,聘请中国工程院院士刘宏为大赛专家委员会主席,中国科学院院士丁汉、中国工程院院士王耀南、中国工程院院士于海斌和中国工程院外籍院士、德国国家工程院院士、德国汉堡科学院院士张建伟为专家委员会联席主席,以及20位知名专家学者组成大赛专家委员会,负责各赛道规则制定及评审。
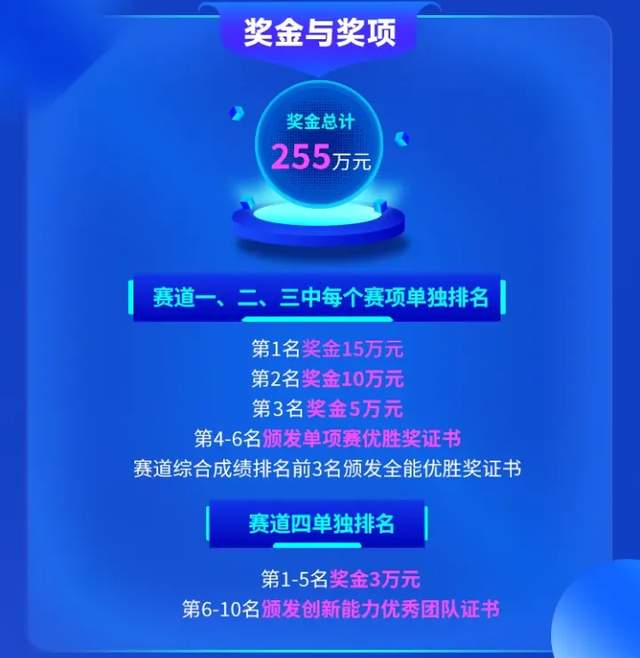
奖励支持方面,本届大赛总奖金池为255万元。主赛道共设置24个奖项及全能优胜奖9名,第1名奖金15万元、第2名奖金10万元、第3名奖金5万元;创新赛道共设置5名创新优胜奖,奖金3万元。同时创新组织形式,由市区镇三级联动,并协同银行机构,给予基金、空间、人才、金融等综合优惠政策落地支持。
关于报名
本次大赛面向全球开放报名,诚邀国内外高校、科研院所、企业及创新团队积极参与。每个参赛队可报名参加多个赛项,不同赛项可使用不同的机器人参赛,但每个赛项每个参赛队不能中途更换参赛机器人。
报名截止日期为2024年9月15日18:00。有意参赛的团队可在截止日期前参照下方图片指引完成在线报名。
在比赛期间,组委会还将开展系列论坛和项目路演,为参赛团队搭建交流平台,促进产学研合作。欢迎有志于推动仿生机器人发展的各界人士踊跃报名参赛,让我们携手探索科技前沿,共同开创智能未来!
本文作者可以追加内容哦 !

