2 月 16 日,石头科技开启机械手臂新品 G30 Space 探索版预约,消费者在不需支付定金即可预先锁定库存;新品将于 3 月 16 日陆续发货,定价 6499 元(水箱版)/6999 元(上下水版),预计国补后价格为 5199 元(水箱版)/5599 元(上下水版)。
天咨在收集各方数据后了解到,G30 Space 探索版在维持产品平 面平整、厚度仍为7.98cm的同时,新增折叠到机器人主机中的五轴机械臂 OmniGrip™,能够搭配精密传感器、摄像头和 LED灯,智能识别和举起额定负载300克的物体,并移动到预编程区域(例如:将袜子带到洗衣篮,将纸团带 到垃圾桶,将拖鞋带到指定区域等);新品通过运用 AI 技术极大提高了智能性, 例如:依靠多模态感知技术和深度学习算法,搭配被首次运用到扫地机器人中的运动学和动力学模型,能够自动计算 RGB 摄像头与 Tof 收集的物品形态信息,选择机械手的最佳抓取点。用户还能进一步训练石头 AI 识别更多个性化物体、通过AI 助力快速建图、物体识别、语言交互、精准定位、图片识别、AI 省心模式等。

扫地机器人作为家用机器人领域中应用相对成熟的品类,有望在 AI 机器人技术不断发展和生态逐步完善后,成为应用最契合的消费品类之一。 随着 AI 机器人技术深化与生态完善,扫地机器人有望进步为家庭服务机器人。从技术深化看,扫地机器人可能通过升级机械手臂硬件,来抓取和归位重量和体积更大的物体,甚至实现辅助越障、上下楼等功能;还能通过 AI处理传感器数据,大大提升智能化水平,例如:结合柔性机械臂实现玻璃杯等易碎物品的安全抓取与整理、监测家庭环境、基于清洁习惯和地板状态定制智慧方案等。从生态完善看,多个家庭服务机器人可由云端 AI 调度,进行智能分工协作,通过数据共 享和硬件协作搭建全家维度的智慧服务体系;行业头部厂商可能推出类似 ROS(机器人操作系统)的平台,吸引开发者开发定制功能(如烹饪辅助、绿植养护、 宠物互动、游戏娱乐等),通过“硬件+服务”生态闭环不断满足用户个性化需求。
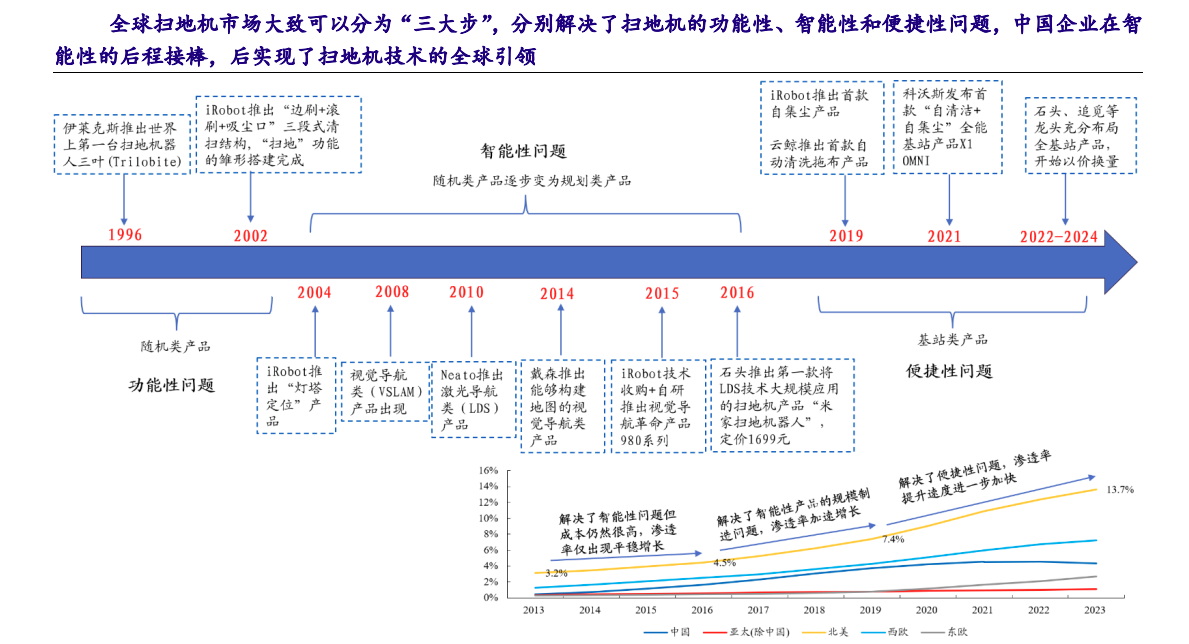
全球扫地机行业的发展本质是围绕着 “功能性”、“智能性”和“便 捷性”三条主线推进的。
第一阶段,解决扫地机清扫的功能性问题,产品以随机型为主。1996 年,伊莱 克斯发布世界上第一台扫地机器人三叶虫(Trilobite),使用超声波进行导航避障; 2002 年,iRobot 推出“边刷+滚刷+吸尘口”三段式清扫结构,以随机碰撞导航为主。 至此“扫地”功能的雏形搭建完成,在 iRobot 推动下,尝鲜人群的购买带动了渗透 率首次提升。然而,随机规划式扫地机清扫效率低、有遗漏等问题始终存在。
第二阶段,解决扫地机的智能性问题,产品进步为规划型。2004 年,iRobot 推 出“灯塔定位”产品首次开始尝试进行清扫规划。Neato(2010 年)和戴森(2014 年)分别推出激光/视觉导航类产品,但方案尚未完全成熟,产品性能未能实现较大 升级,渗透率提升出现瓶颈。2012 年彼时行业龙头 iRobot 收购 Evolution Robotics 并 获得 vSLAM 导航专利,于 2015 年推出革命性产品 Roomba 980,产品性能及售价较 大幅度提升。2016 年,石头科技为小米代工的“米家扫地机器人”第一次将 LDS 技 术大规模应用于扫地机产品上,大幅降低了规划类产品的消费门槛。
第三阶段,解决扫地机的便捷性问题,产品进步为基站型。2019 年,iRobot 推 出了业内首款自集尘产品 S7+,云鲸推出首款自清洁产品 J1,行业开始进入基站时 代。2021 年起,我国扫地机厂商不陆续推出自动上下水、全基站、机械臂、底盘升 降产品,继续朝着解放双手的便捷性出发,逐渐实现了扫地机品类的技术引领。
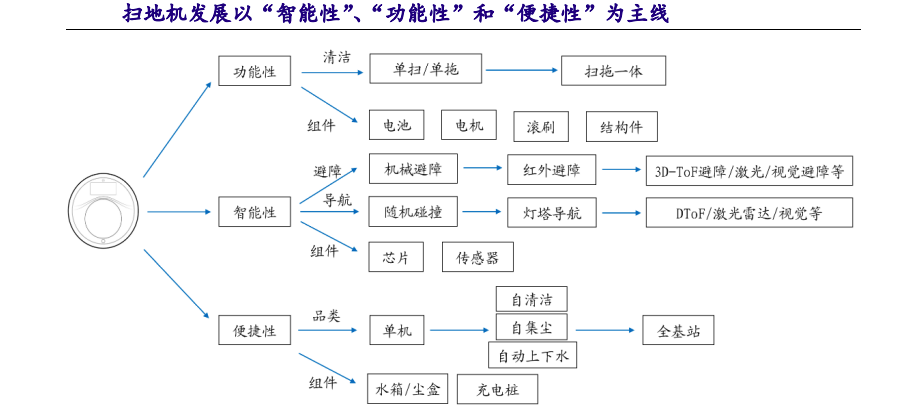
在功能性方面,围绕“扫地”这一核心功能展开,从最初的单一扫地功能到实 现扫拖一体,进一步发展出适配更多场景的功能;在智能性方面,本质是“机器人” 相关技术不断发展的体现,在导航技术上不断迭代,历经“随机碰撞”、“灯塔导航”、 “VSLAM”、“LDS-SLAM”等多个发展阶段。在便捷性方面,行业从“自清洁”、“自集尘”,到“全基站”,致力于解放双手、高度提升清洁满意度。
从产品生命周期看,目前头部品牌扫地机产品已相对成熟,引领行业从“导入期”跨入“成长期”,即渗透率提升阶段。但产品“成熟”并非“创新”到头。扫地机仍有较多痛点亟待解决, 作为智能清洁家电的最初形态,未来仍有一定创新空间。
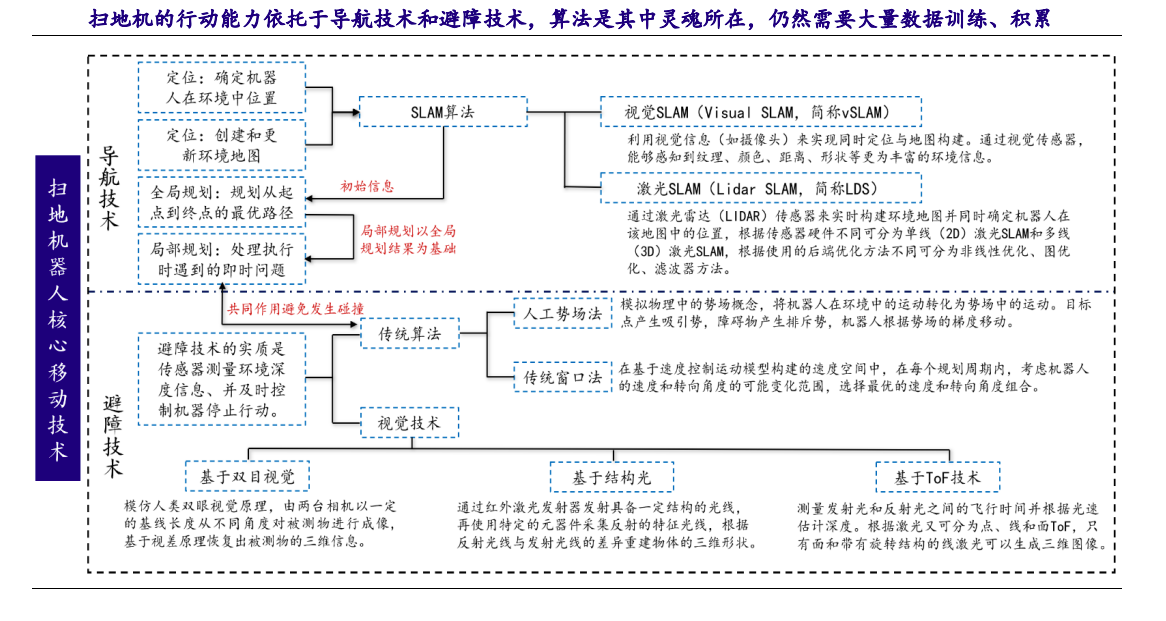
第一,扫地机的智能性主要体现在导航和避障两个方面,目前已基本得到较低成本方案解决,但作为扫地机智能性的“灵魂”,算法仍然需要厂商长久的数据积累 和反馈后持续迭代,AI 技术发展后有望得到进一步发展。 扫地机器人作为一种自动化家用清洁设备,能够根据指示到达指定地点,并在指定地点完成清扫工作。因此扫地机器人在行动能力上需要解决三个问题:
(1)“我” 现在身处何处?
(2)“我”要往何处走?
(3)“我”如何到达该处?
导航技术解决前两个问题,即了解当前所处位置以及目标位置。对于导航 技术而言,一套成熟的方案需要包括定位、建图、全局规划以及局部规划等模块。 在上述经典框架下,通常采用 SLAM 算法(simultaneous localization and mapping) 实现同时定位与建图。SLAM 算法根据使用的传感器可以分为视觉 SLAM(Visual SLAM,简称 vSLAM)和激光 SLAM(Lidar SLAM,简称 LDS)。视觉 SLAM 传 感器能够感知到纹理、颜色、距离、形状等更为丰富的环境信息,但使用时易受光 照、运动抖动等因素干扰;LDS 则不受光照强度干扰,但在动态环境及类似几何环 境下(如长直走廊)效果较差。此两种算法存在天然的互补性,将两种传感器进行 数据融合可满足大多数环境的使用要求。
避障技术解决第三个问题,即保证扫地机器人能够顺利到达目标位置。避 障技术的实质是传感器测量环境深度信息、并及时控制机器停止行动。由于避障技 术对于扫地机器人的正常使用具有直观影响,因此成为许多产品的主要卖点。 当前主流的避障技术主要是 3D 视觉技术,按照三维景深测量方式可以分为双目 视觉、结构光技术、3D-ToF 技术三个大类。虽然 LDS/视觉导航技术中也可以实现避 障,但为了达到更精准的避障性能,目前位于顶部的雷达常常融合多传感器,例如 :视觉+激光,同时运用 AI 技术进行物体识别,达到较强的避障性能。 虽然目前导航和避障技术已经有较为成熟的较低成本解决方案,但算法是其中 灵魂所在、决定了扫地机智能性的天花板。算法的优化与迭代需要大量数据训练积累和实践调教,厂商必须不断加深自身的软件壁垒,最终形成产品口碑和品牌力。 算法智能化的提升空间包括:大模型语音、精准避障、导航&避障融合、信息防护、 产品防下坠、脏污识别、策略化清扫等,当前的扫地机远未达到足够智能的程度。
亚马逊平台管控严格、刷单现象少,评论置信度较高。天咨选取了扫地机品类各品牌热销第一的 SKU,通过对其前一百的评论进行词云分析,发现石头科技产品 力整体较强,负面评价较少,预计在算法端实现引领。
(1)石头科技(选取链接对应产品为 S7 Maxv Ulltra/S8 Maxv Ulltra):好评主要集中在清洁效率、避障导航性能、地图绘制以及应用程序功能上,但在毛发、地毯等特殊清洁方面有负面评价,主要是针对未升级边刷清扫的 S7 Maxv Ulltra。
(2)科沃斯(选取链接对应产品为 DEEBOT OZMO U2):好评主要集中在清 洁干净、效率高,差评主要集中电量续航能力差、应用程序时常出故障且不够智能、 保修和维护方面表现不好,有噪音大、卡顿或迷路的现象等。
(3)iRobot(选取链接对应产品为 j7+):好评集中在宠物友好、清洁干净、地 图绘制准确等,差评主要集中在噪音大、易卡困、清洁效果不理想等,清洁效果方 面比较两极分化。
(4)追觅(选取链接对应产品为 x40 ultra)好评主要集中在清洁干净、应用程序智能、导航避障性能好,以及噪音控制上,但应用程序时常出现问题,指令没办法准确传达到机器人,且清洁效果也有一定负面评价。
第二,在便捷性方面,扫地机有望进一步解放双手:(1)边角清洁(不用再二 次清扫);(2)毛发处理(减少甚至不用维护);(3)越障(门槛、厚地毯等);(4) 基站污水易产生异味;(5)当前垃圾仍需要定期清理;(6)噪音控制等。
第三,在功能性方面,可在扫拖一体的基础上进一步增加、增强功能。
例如:机械手臂产品有效拓宽了扫地机的能力边界:(1)在组件上,进一步优化电池、电机、 滚刷等对用户使用体验有高度影响的元素;(2)尝试开拓其他功能,如提升机械臂 工作效率、增添上楼功能等;(3)实现媲美洗地机效果的洗地机器人;(4)实现拾 取衣物等多元化清洁功能。(5)低矮空间清扫(兼顾导航避障性能的同时做薄机身)。

为当前扫地机器人携带的机械手臂只是发展的第一阶段,期间扫地机可以实现袜子、大纸团和拖鞋等简单障碍物的拾起和移除功能,解决了以前在清扫过程中 遇到障碍物时需要绕开、从而形成清洁盲区的痛点,也进一步拓宽了地面清洁功能 外的能力边界。与此同时,我们判断机械手臂可以持续进化,预计发展到第二个阶段后,伴随硬件优化、AI 技术的发展和算法持续积累,可以实现诸如辅助越障、上下楼等功能,且归位物品的种类也会进一步提升至重量和体积更大的物体。第三个阶段可能可以进化为家庭服务机器人形态。
$石头科技(SH688169)$ $科沃斯(SH603486)$ $南方人工智能混合(OTCFUND|005729)$
本文作者可以追加内容哦 !
![[拜神]](http://gbfek.dfcfw.com/face/emot_default_28x28/emot51.png "拜神")


